
# 一、技术七代范式演进

机器人操作(Manipulation)技术的发展不是某一代完全推翻前一代,而是在前面能力的基础上不断叠加和扩展。
Manipulation 技术的七代演进逻辑:
- 传统抓取:解决“能不能抓”
- GraspNet / CNN:解决“能不能从数据中学会抓”
- SayCan / RT:解决“能不能听懂任务并调度技能”
- ACT:解决“长时序动作如何减少误差累积”
- Diffusion Policy:解决“多种合理动作如何生成”
- VLA + Flow:解决“视觉、语言、动作如何统一建模”
- World Model:解决“机器人如何先预测后行动”
从单步抓取 → 多任务控制 → 语言条件任务 → 稳定动作生成 → 通用视觉语言动作策略 → 具备预测和规划能力的智能体。
# 1. 传统抓取:几何规则阶段(~2016)
这一阶段的核心任务是解决“机器人怎么抓住物体”。
主要方法依赖:
- 几何分析
- 深度图/点云
- 抓取姿态规划
- 人工设计规则
其特点是:
- 可解释性强
- 针对单步抓取效果较好
- 更像局部技能,而不是完整任务策略
局限在于:
- 很难处理复杂长时序任务
- 泛化能力弱
- 不能理解语言和高层任务目标
所以这一阶段解决的是最基础的“能抓”,但离“会做事”还很远。
# 2. GraspNet / CNN 预测阶段(2017-)
这一阶段开始把深度学习引入抓取任务。
核心变化是:
- 不再完全依赖手工几何规则
- 开始用 CNN 直接预测抓取点、抓取姿态或抓取质量
相较于传统几何方法,这一阶段的提升在于:
- 对复杂视觉场景的适应能力更强
- 能从数据中学习抓取模式
- 提高了抓取检测和泛化能力
但它本质上还是在解决“抓哪里、怎么抓”的问题,
还没有真正进入“多步骤任务执行”和“通用机器人智能”的阶段。
# 3. SayCan / RT:LLM + Robot 阶段(2022-2023)
这一阶段的重要变化是:
机器人开始接入语言模型,能够理解任务指令。
代表性思路:
- 用大语言模型做高层规划
- 用机器人已有技能做低层执行
这意味着机器人不再只是“看见物体去抓”,
而是开始能处理类似:
- “帮我拿一瓶水”
- “把桌子上的垃圾丢掉”
这样的自然语言任务。
这一代的意义在于:
- 第一次真正把“语言”和“机器人动作”连接起来
- 让机器人从“执行固定技能”走向“根据任务调度技能”
但问题是:
- 高层规划和低层执行仍然是分开的
- 技能接口依赖人工设计
- 任务链条一长,误差和不稳定性就会增加
# 4. ACT:动作分块阶段(2023)
ACT 的核心思想是:
不要一帧一帧预测动作,而是一次预测一整段动作。
为什么会提出这个方法?
因为逐帧控制有一个严重问题:
前一帧错一点,后一帧继续接着错,误差会不断累积,导致长任务越来越不稳定。
ACT 的解决方法是:
- 把连续动作按 chunk 分块
- 每次输出未来一小段动作序列
- 提高长时序任务的稳定性
它的重要意义在于:
- 显著缓解累积误差问题
- 特别适合双臂操作和精细任务
- 成为后续很多方法的基础思想
可以说,ACT 解决的是:
机器人在长任务中“动作怎么稳定输出”的问题。
# 5. Diffusion Policy:多模态动作分布阶段(2023)
这一阶段开始引入扩散模型来生成动作。
它出现的原因是:
很多机器人任务不是只有唯一正确动作,而是存在多种合理路径。
例如抓一个杯子,可以从左边抓,也可以从右边抓。
传统回归模型容易把这些不同解“平均”掉,结果就变成一个不合理的中间动作。
扩散模型则不同,它把动作生成看成“从噪声逐步去噪”的过程,因此更适合处理多模态动作分布。
这一代的突破在于:
- 能表示多个可能的合理动作轨迹
- 对复杂接触任务更稳定
- 显著提升操作任务表现
所以 Diffusion Policy 解决的是:
机器人动作不是单一答案时,该怎么生成合理动作。
# 6. VLA + Flow:视觉语言到动作统一阶段(2024-2025)
这一阶段的核心是 VLA(Vision-Language-Action)。
也就是说,把:
- 视觉输入
- 语言指令
- 动作输出
放进同一个统一模型中。
相比前面的路线,这一代不再是:
- 语言模型负责规划
- 单独控制器负责动作
而是尝试直接学习:
这样做的意义是:
- 模型结构更统一
- 更容易形成跨任务、跨场景的泛化能力
- 更接近真正的通用机器人策略
其中 Flow Matching 可以看成 Diffusion 的进一步升级:
- 推理更快
- 轨迹生成更高效
- 更适合高频控制
因此这一阶段解决的是:
如何把感知、语言理解和动作生成统一到一个端到端框架中。
# 7. World Model:想象到行动阶段(2025-)
这一阶段比 VLA 更进一步。
VLA 更像“看到就做”,是一种偏反射式的策略;
World Model 则强调:
机器人先在内部预测未来后果,再决定怎么行动。
也就是:
- 先“想象”动作可能带来的结果
- 再选择更优动作
- 形成更强的规划和长期决策能力
它的重要意义在于:
- 不再只依赖当前观测直接反应
- 开始具有“预测未来”的能力
- 更适合复杂长任务、稀疏奖励任务和开放环境
可以理解为,World Model 解决的是:
机器人不仅要会动,还要会在动之前先想一想。
# 二、谷歌/DeepMind 的一部分过渡性工作(2022-2023)
Google / DeepMind 在 2022 到 2023 年间,通过一系列连续工作,把机器人操作从“语言调技能”逐步推进到了“视觉-语言-动作统一建模”的 VLA 范式。
因此,这一页不是单独介绍几个模型,而是在展示一条非常清晰的技术演进路线:
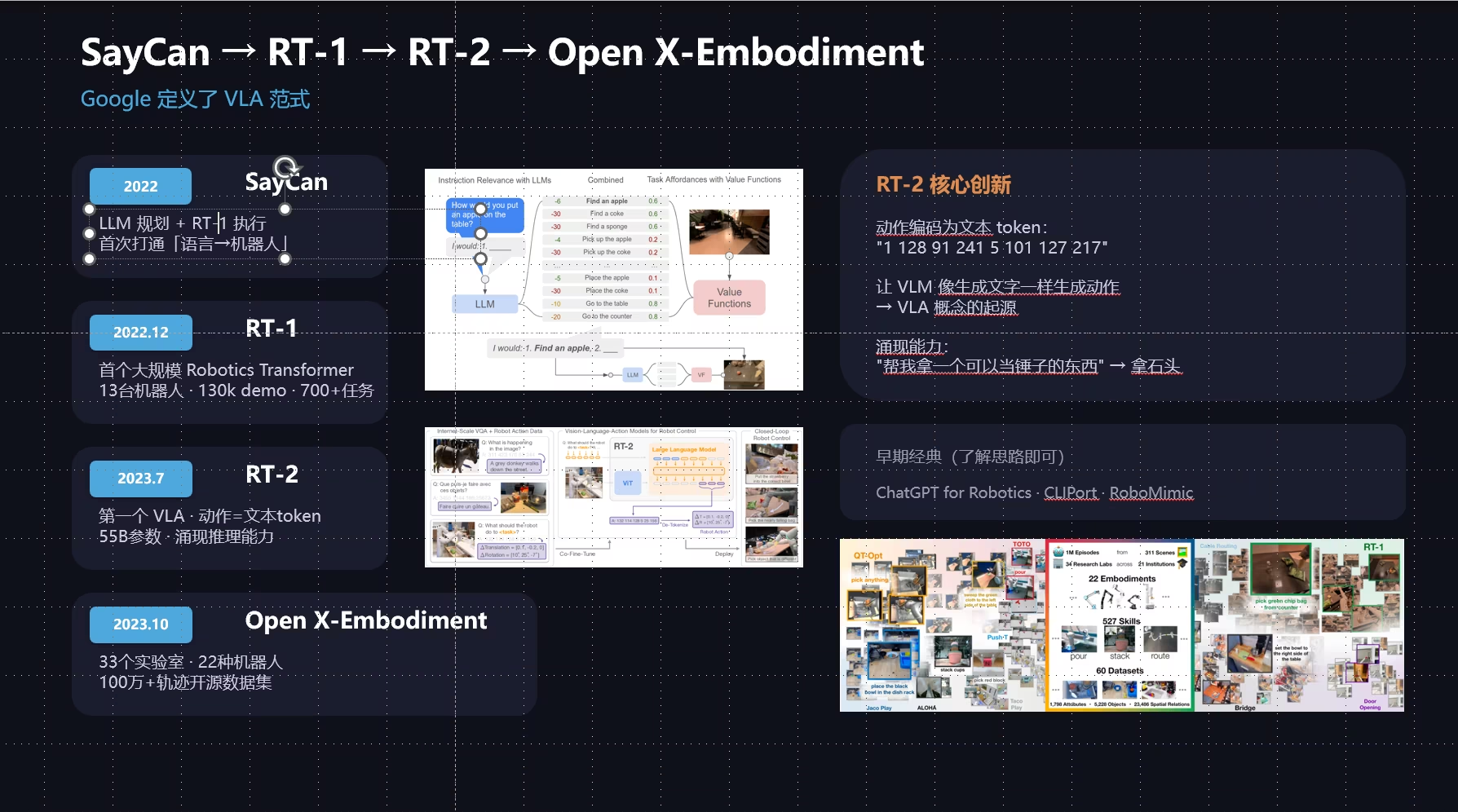
SayCan → RT-1 → RT-2 → Open X-Embodiment。
- SayCan:解决“语言任务如何映射到机器人可执行技能”
- RT-1:解决“机器人能不能直接学到统一的多任务控制策略”
- RT-2:解决“视觉、语言、动作能不能统一到一个生成模型中”
- Open X-Embodiment:解决“通用机器人模型所需的大规模跨平台数据从哪里来”
谷歌系工作一方面推动了机器人从“语言调技能”走向“VLA 范式”,另一方面也推动了通用机器人大模型所需的数据基础设施建设。
SayCan 让机器人开始理解语言任务,RT-1 让机器人开始学统一策略,RT-2 让视觉-语言-动作真正合流,而 Open X-Embodiment 则为通用机器人策略提供了跨平台大规模数据底座。
# 1. SayCan:语言规划 + 技能执行阶段(2022)
SayCan 可以看成是这条路线的起点。
它的核心思想不是让大模型直接输出机械臂底层动作,
而是把机器人系统拆成两层:
(zjx——Ps:貌似就是选择已经存在的技能)
- 上层:大语言模型负责理解任务,并选择“下一步应该做什么”
- 下层:机器人已有技能系统负责判断“这个动作能不能做成”
因此,SayCan 的本质是:
把“应该做什么”和“能不能做到”结合起来进行决策。
例如,面对“帮我拿点喝的”这种指令时,
系统不会直接生成控制量,而是先在高层规划步骤,再从已有技能中选择当前最合适、最可执行的那个技能。
这一代的重要意义在于:
- 第一次比较完整地打通了“自然语言任务 → 机器人执行”这条链路
- 让机器人开始具备基于语言指令调度技能的能力
- 开启了 LLM + Robot 的研究范式
但它的局限也很明显:
- 高层规划和低层执行仍然是分开的
- 依赖人工设计好的技能库
- 不是端到端动作生成
- 泛化能力仍然受限于已有技能集合
所以 SayCan 解决的是:
机器人如何理解语言任务,并从已有技能中选出合适的一步。
# 2. RT-1:大规模机器人 Transformer 阶段(2022.12)
RT-1 比 SayCan 更进一步。
它不再只是在高层“选技能”,
而是尝试直接用一个统一的 Transformer 模型来学习:
- 图像输入
- 语言指令
- 动作输出
RT-1 的意义在于:
- 它把机器人控制看成一个可以通过大规模数据训练的序列建模问题
- 证明了多任务、多场景、多机器人数据可以显著提升泛化能力
- 让机器人策略开始向“大模型化”方向发展
PPT 中提到 RT-1 使用了:
- 13 台机器人
- 130k demo
- 700+ 任务
这些数字体现出的重点不是规模本身,而是一个关键结论:
机器人控制也可以像视觉、语言任务一样,通过大规模数据驱动训练出统一策略。 :contentReferenceoaicite:2 (robotics-transformer1.github.io)
这一代解决的是:
机器人能不能不再依赖手工技能拼接,而是直接学会多任务控制策略。
但它仍然不是完整 VLA,
因为它更偏向“视觉 + 任务条件 → 动作”,语言推理和语义泛化能力还有限。
# 3. RT-2:VLA 雏形正式出现(2023.7)
RT-2 是这一页最关键的里程碑。
它最重要的创新是:
把动作表示成 token,让视觉语言模型像生成文本一样生成动作。
也就是说,在 RT-2 中:
- 视觉输入可以编码进模型
- 语言输入可以编码进模型
- 动作输出也被离散化为 token 序列
这样一来,模型的形式就变成了真正统一的:
这就是为什么 RT-2 常被认为是早期 VLA 的代表作。
这就是为什么 RT-2 常被视为早期 VLA 的代表性工作。
PPT 中给出的动作编码示例:
"1 128 91 241 5 101 127 217"
本质上就是在说明:
机器人动作第一次被纳入了类似语言生成的统一表示框架。
RT-2 的意义在于:
- 第一次较清晰地把视觉、语言、动作放进同一生成模型
- 让机器人可以借助 VLM 的语义能力来增强任务理解
- 展现出一定的“涌现推理”能力,例如根据指令选择“可以当锤子的东西”
因此,RT-2 解决的是:
如何把视觉理解、语言理解和动作生成统一到一个模型中。
不过它也有明显局限:
- 模型大,部署成本高
- 动作 token 化虽然统一了表示,但连续控制精度和实时性仍受限制
- 开源和工程可复现性不足
# 4. Open X-Embodiment:跨机器人大规模数据阶段(2023.10)
如果说 RT-2 证明了 VLA 方向是可行的,
那么 Open X-Embodiment 解决的就是另一个关键问题:
通用机器人策略所需的大规模数据从哪里来?
机器人领域长期有一个很大的瓶颈:
每个实验室、每种机器人、每个任务的数据格式都不同,
导致数据很难共享,模型也很难像 NLP 和 CV 一样依赖超大规模统一数据集预训练。
Open X-Embodiment 的核心贡献就是:
- 把多个实验室的机器人数据整理为统一格式
- 融合不同机器人 embodiment 的真实世界轨迹
- 让不同平台的数据可以被同一个模型共同利用
- 为通用机器人策略预训练提供数据基础
公开资料显示,Open X-Embodiment 包含:
- 100 万+ 真实机器人轨迹
- 22 种机器人 embodiment
- 20 多家机构/21 个机构协作
- 500+ 技能、15 万+ 任务规模
因此,它的重要性不在于“又提出了一个新结构”,
而在于它把机器人研究从:
单实验室、小数据、单平台闭环
推进到了:
跨平台、大规模、标准化数据驱动
这一代真正解决的是:
通用机器人模型所需的数据规模、多样性和标准化问题。
同时,Open X-Embodiment 不只是一个数据集概念,
它背后还对应了 RT-X 这类跨机器人策略研究,说明作者们不只是“收集数据”,而是在探索:
能否训练出真正跨 embodiment 的通用机器人策略。
所以它在这页里的作用非常关键:
SayCan、RT-1、RT-2 给出了“模型范式”,
而 Open X-Embodiment 给出了“把这种范式做大的数据基础设施”。
# 三、ACT:Action Chunking 消灭累积误差
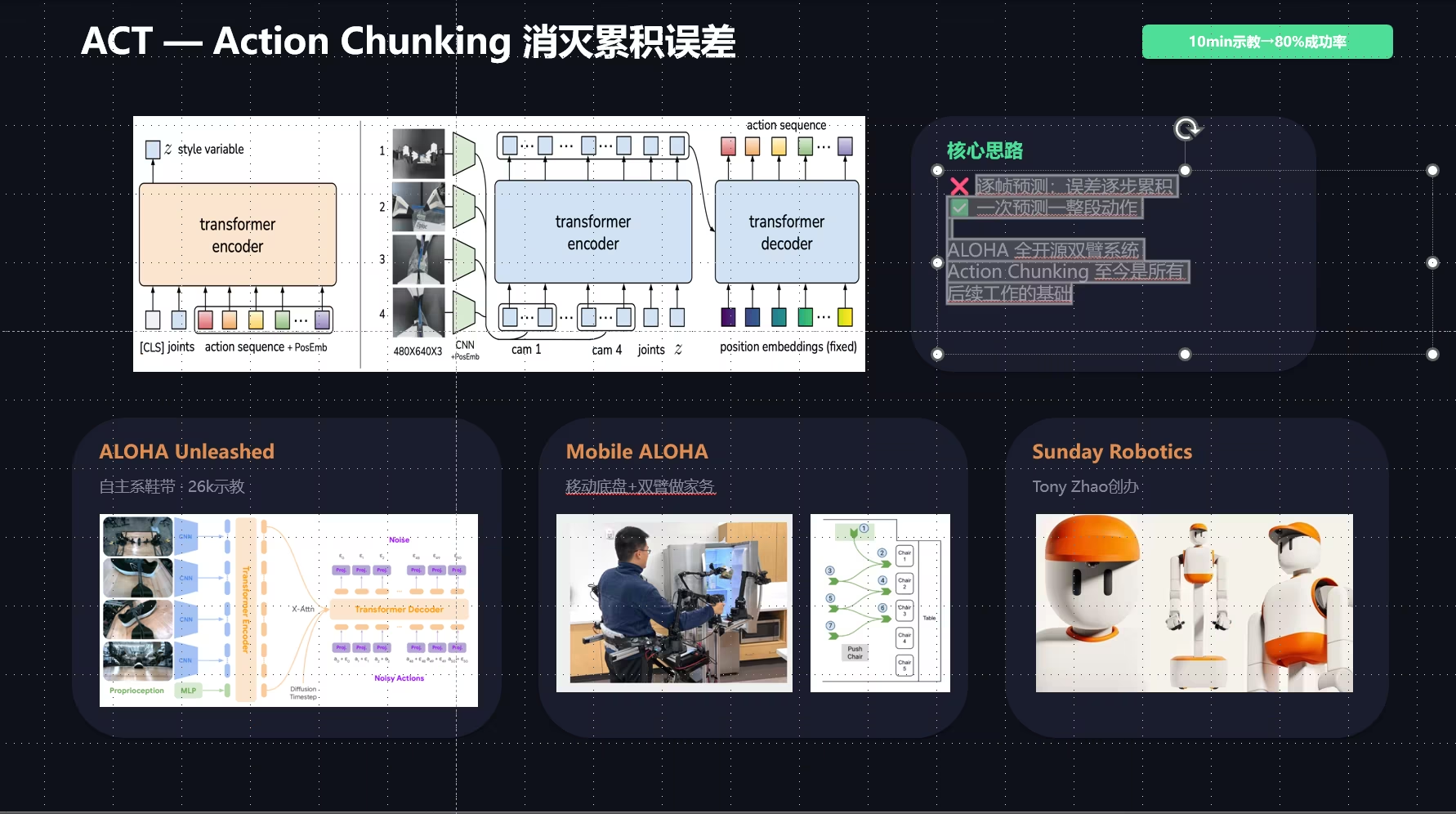
这一页的核心观点是:
ACT 的提出,标志着机器人操作研究开始正面解决“长时序任务中的动作累积误差”问题。
它的重要性不在于模型特别大,而在于它抓住了机器人控制中的一个关键痛点:
逐帧预测虽然直观,但误差会一步一步积累,最终导致长任务崩掉。
- 逐帧预测 的主要问题是累积误差
- ACT 通过动作分块,缓解了这一问题
- ALOHA 让这条路线具备了低成本采数和真机验证能力
- 因此,ACT 成为了后续很多操作策略方法的基础
所以,这一页的核心可以概括为:
ACT 解决的不是“机器人会不会动”,而是“机器人在长任务中怎么更稳定地持续输出动作”。
# 1. 为什么会提出 ACT
在很多早期的模仿学习或控制方法中,
模型通常每一时刻只预测当前一步动作。
这种方式的问题在于:
- 当前一步如果稍微错一点
- 下一步又是在前一步错误基础上继续预测
- 误差会沿时间不断传播和放大
因此,在长时序、精细操作任务中,
逐帧预测很容易出现:
- 动作越来越偏
- 接触过程不稳定
- 任务越长越容易失败
所以 ACT 的提出,本质上是在解决:
机器人长任务中,动作为什么会越做越偏。
# 2. ACT 的核心思想
ACT 的核心思想是:
不要一帧一帧预测动作,而是一次预测一整段动作。
也就是说,模型不是只输出当前时刻的一个动作,
而是输出未来一小段连续动作序列,也就是一个 action chunk。
这样做的好处是:
- 可以从更长时间范围上建模动作
- 减少逐帧闭环带来的误差累积
- 让动作生成更加平滑和稳定
因此,ACT 不只是“改了一种输出形式”,
而是在动作时间结构上做了重要改变。
# 3. ACT 的意义
ACT 的重要意义在于:
- 它显著缓解了长时序任务中的累积误差问题
- 特别适合双臂协作、精细操作和连续接触任务
- 让机器人在较少示教数据下也能取得较高成功率
- 成为后续很多操作策略方法的基础思想
PPT 中提到:
- 10 分钟示教即可达到较高成功率
- ALOHA 全开源双臂系统推动了这一方向快速传播
这说明 ACT 的影响力不仅来自论文本身,
还来自它与低成本数据采集系统结合后,真正提升了具身智能实验的可复现性。:contentReferenceoaicite:2
# 4. ALOHA 与 ACT 的关系
ALOHA 是 ACT 这条路线的重要承载平台。
它的价值在于:
- 提供了低成本、可复现的双臂遥操作系统
- 支持快速采集示教数据
- 让 ACT 这类方法不再只是论文方法,而是可以直接在真实系统中验证
后续像:
- ALOHA Unleashed
- Mobile ALOHA
都说明这条路线已经从“实验室验证”走向“更复杂真实任务”的扩展。
因此,ACT 的影响并不是孤立的模型创新,
而是和“可采集数据、可做真机实验、可复现”的系统路线绑在一起的。:contentReferenceoaicite:3
# 四、Diffusion Policy:扩散模型改变了一切
这一页的核心观点是:
Diffusion Policy 的意义在于,它把机器人动作生成从“单点回归”推进到了“多模态分布建模”。
这使得机器人在面对存在多种合理解的任务时,不再被迫预测一个折中的错误动作,而是能够生成一条合理的动作路径。
- 机器人动作往往是多模态的,不存在唯一正确解
- 普通回归容易把多种解平均掉,导致无效动作
- Diffusion Policy 用生成式建模更好地表示合理动作分布
- 这条路线后续又进一步演化到 Flow Matching 等更高效方法
所以,这一页的核心可以概括为:
Diffusion Policy 让机器人动作建模从“单点预测”进入了“多模态生成”阶段。
# 1. 为什么会出现 Diffusion Policy
在很多机器人任务中,
同一个目标往往不止一种正确动作路径。
例如抓一个物体:
- 可以从左边接近
- 也可以从右边接近
- 可以先抬高再伸过去
- 也可以先平移再下压
也就是说,动作分布往往是多模态的。
如果用普通回归模型去学这些动作,
模型很容易把这些不同解“平均”起来,
最后输出一个不合理的中间动作。
因此,Diffusion Policy 的提出,本质上是在解决:
当一个任务存在多种合理动作时,模型该如何表示这种多样性。
# 2. Diffusion Policy 的核心思想
Diffusion Policy 的基本思路是:
把动作生成看成一个从噪声逐步去噪的过程。
它不是直接回归出一个确定动作,
而是逐步生成一条合理动作轨迹。
这样做的好处是:
- 更适合建模复杂、多模态的动作分布
- 可以生成多种不同但合理的动作路径
- 更适合复杂接触、精细操作和长时序任务
因此,Diffusion Policy 的核心不是“用了扩散模型”这么简单,
而是它改变了机器人动作建模的思维方式:
动作不是一个唯一答案,而是一个条件分布。
# 3. Diffusion Policy 的意义
PPT 中提到:
- 其在多个任务上平均超越此前 SOTA 46.9%
- 在机器人领域,这是极大的性能跃迁
这说明扩散模型在机器人中的价值非常明显:
- 它更能适应真实任务中的多解性
- 对接触过程和动作细节更鲁棒
- 在复杂操作任务上比简单回归更有优势
因此,这一代的核心突破在于:
机器人动作生成不再只是预测“一个点”,而是建模“一类合理轨迹”。
# 4. 从 Diffusion 到 Flow Matching
PPT 中还提到:
Flow Matching 可以看作 Diffusion 的升级版。
这意味着:
- Diffusion 路线证明了“生成式动作建模”是有效的
- 后续工作则开始继续追求更高效的推理和更快的动作生成
因此,Diffusion Policy 的意义不仅在于它本身效果好,
还在于它为后续的:
- Flow Matching
- 更高频控制
- 更轻量生成式动作模型
铺平了道路。
# 5. 相关扩展方向
PPT 中提到的相关方向包括:
- UMI:通用操作接口
- RDT-1B:更大规模的机器人基础模型
- DP3:面向 3D 点云的扩展版本
这些工作共同说明:
Diffusion 不再只是一个单独技巧,而是在逐渐成为机器人操作策略建模的重要范式。
# 五、VLA 全面爆发:从闭源大模型到开源消费级

PPT 中列出了几个代表性方向:
- RT-2:第一个广为人知的 VLA 代表
- OpenVLA:首个影响力很大的开源 VLA
- Octo:全开源通用策略
- HPT:异构预训练路线
- SmolVLA:更轻量、消费级可训练
- π0:VLM + Flow Matching 路线
# SmolVLA 和 π0 的意义
PPT 特别强调了:
- SmolVLA:消费级 GPU 可训练
- π0:VLM + Flow Matching,50Hz 控制,openpi 开源
这两条线非常有代表性:
SmolVLA 说明:
VLA 不一定非要超大参数才能有研究价值。
π0 说明:
VLA 不仅要会理解,还要能高频、连续、稳定地产生动作。
因此,这一阶段不只是“把模型做小”,
而是在同时追求:
- 通用性
- 可训练性
- 可微调性
- 实时性
- 开源可复现性
# 六、π 系列完整演进:快速迭代的范本
这一页的核心观点是:
π 系列展示了具身智能领域一种非常典型的发展模式:先用一个强有力的基础架构打开局面,再通过快速迭代不断补足速度、泛化、异构数据利用和持续学习能力。
# 1. π0:统一大脑与小脑
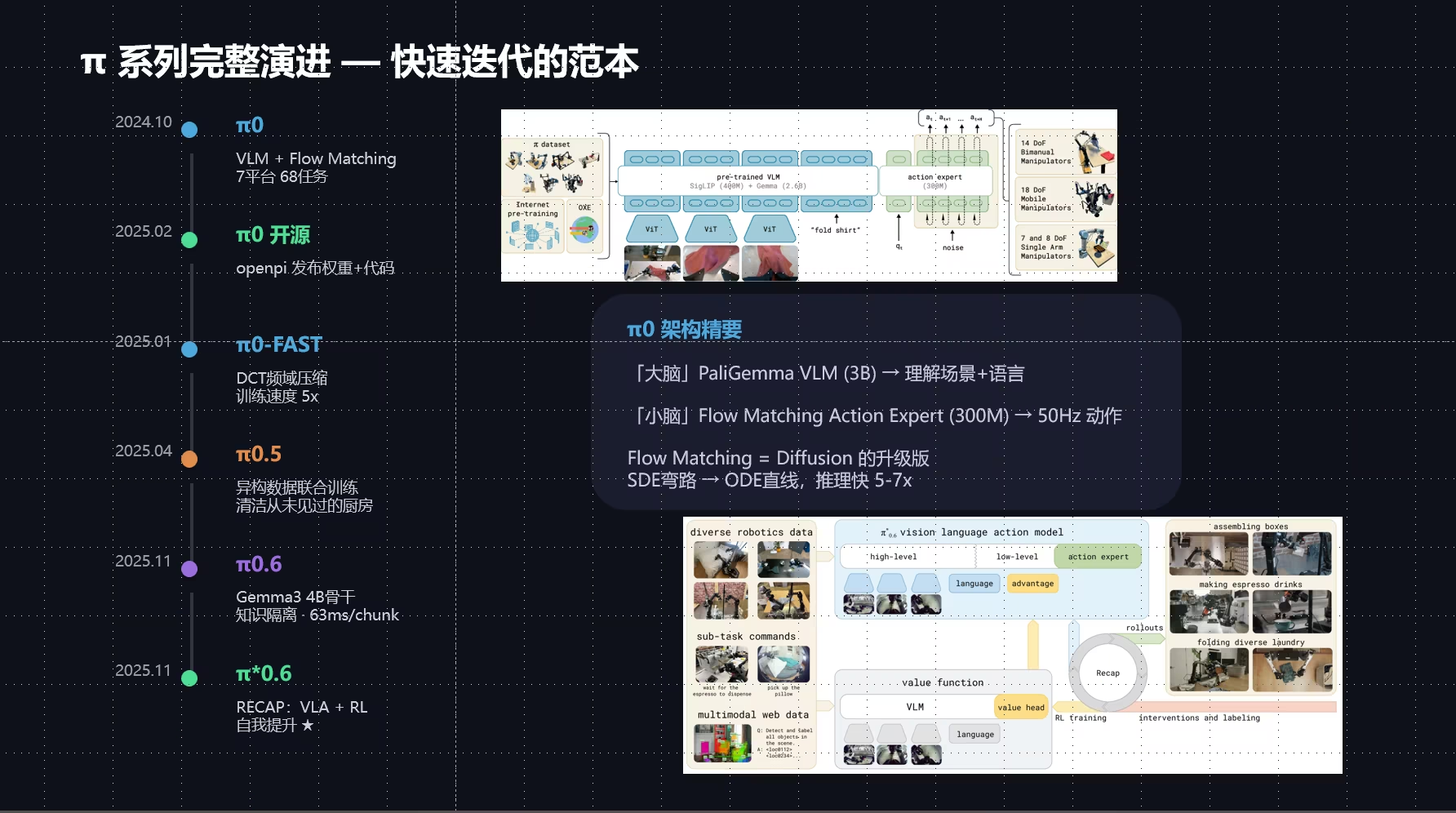
PPT 中把 π0 概括为:
- 「大脑」PaliGemma VLM(3B)
- 「小脑」Flow Matching Action Expert(300M)
这个比喻很直观。
它的含义是:
- 大脑负责理解视觉和语言任务
- 小脑负责高频、连续地输出动作
这种设计说明 π0 并不是让一个大模型直接包办一切,
而是把“理解”和“控制”分工处理。
其核心意义在于:
- 保留大模型的语义理解能力
- 同时兼顾机器人控制对实时性和精细动作的要求
# 2. 为什么 π0 很重要
π0 的重要性在于,它尝试同时解决两个问题:
第一,如何利用 VLM 的强语义能力;
第二,如何让机器人动作生成足够快、足够稳定。
PPT 中强调:
- VLM + Flow Matching
- 50Hz 动作输出
- openpi 开源
这说明 π0 的目标不是只做一个“会说会看”的模型,
而是一个真正能用于高频控制的 VLA 系统。
# 3. π 系列后续演进的逻辑
PPT 给出的后续演进包括:
- π0-FAST:强调训练速度提升
- π0.5:强调异构数据联合训练与未见环境泛化
- π0.6:进一步升级骨干网络与系统能力
- π*0.6:通过 RECAP 把 RL 引入 VLA
从这条线可以看出,π 系列不是单一模型,
而是一条持续补能力的路线。
它的迭代逻辑大致是:
- 先把 VLA 跑通
- 再提升训练和推理效率
- 再增强跨任务、跨环境泛化
- 最后引入持续学习和 RL 提升能力上限
因此,π 系列的价值不只是某一版模型效果好,
而在于它展示了:
VLA 如何从“能跑”逐步进化到“更快、更稳、更会学”。
# 七、π*0.6 + RECAP:RL is Back
这一页的核心观点是:
纯模仿学习虽然已经能让机器人学会很多技能,但它的上限始终受限于示教数据;RECAP 这类方法的意义,在于让 VLA 开始具备“越用越好”的能力。
# 1. 为什么 VLA 还需要 RL
在纯模仿学习框架下,
机器人学到的本质上是“人怎么做,我就怎么做”。
这带来一个很明显的上限:
- 如果示教里没有覆盖某种情况,模型就容易失败
- 如果部署环境比训练环境更复杂,模型适应能力有限
- 如果机器人执行中犯错,它通常不会自动变得更好
因此,纯模仿学习的能力上限,往往被示教质量和覆盖范围锁死。
这就是为什么 PPT 会强调:
之前所有 VLA 基本都是纯模仿学习路线。
# 2. RECAP 的核心思想
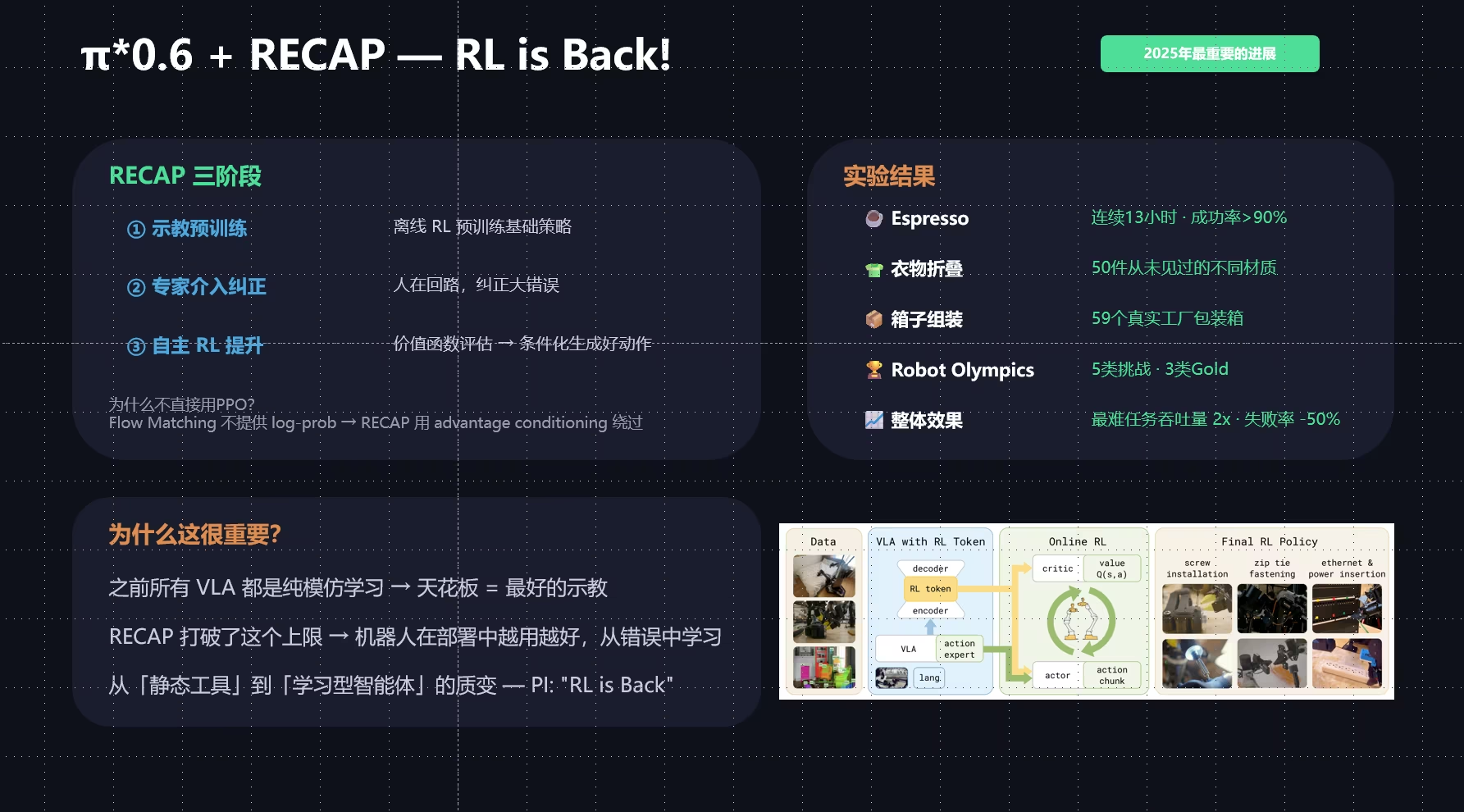
PPT 中把 RECAP 概括为三阶段:
-
示教预训练
用示教和离线 RL 打基础策略 -
专家介入纠正
人在回路,对大错误进行纠偏 -
自主 RL 提升
通过价值评估与条件化生成,继续提升策略质量
这条路线的核心含义是:
机器人不再只是复现人的示范,而是开始利用部署经验继续优化自己。
# 3. 为什么这一点很重要
这意味着机器人策略从:
- 静态的模仿模型
变成了:
- 能在部署中继续提升的学习型智能体
PPT 中给出的例子包括:
- 浓缩咖啡任务长时间稳定执行
- 衣物折叠应对未见材质
- 工厂包装箱组装
- 机器人竞赛挑战
这些例子本质上都在说明:
RL 的引入开始帮助 VLA 突破纯示教上限。
# 4. 这一页真正想表达什么
“RL is Back” 这句话的重点不是说传统强化学习原封不动回来了,
而是说在 VLA 时代,RL 又重新变得重要了。
因为 VLA 解决了:
- 感知
- 语言理解
- 动作生成
- 初始技能获取
而 RL 接下来要解决的是:
- 部署中持续改进
- 更强的泛化
- 超越人类示教上限
- 从错误中恢复并学习
因此,这一页真正标志的是:
具身智能开始从“会模仿”走向“会自我提升”。
# 八、开源 VLA 怎么选:π0 vs GR00T N1
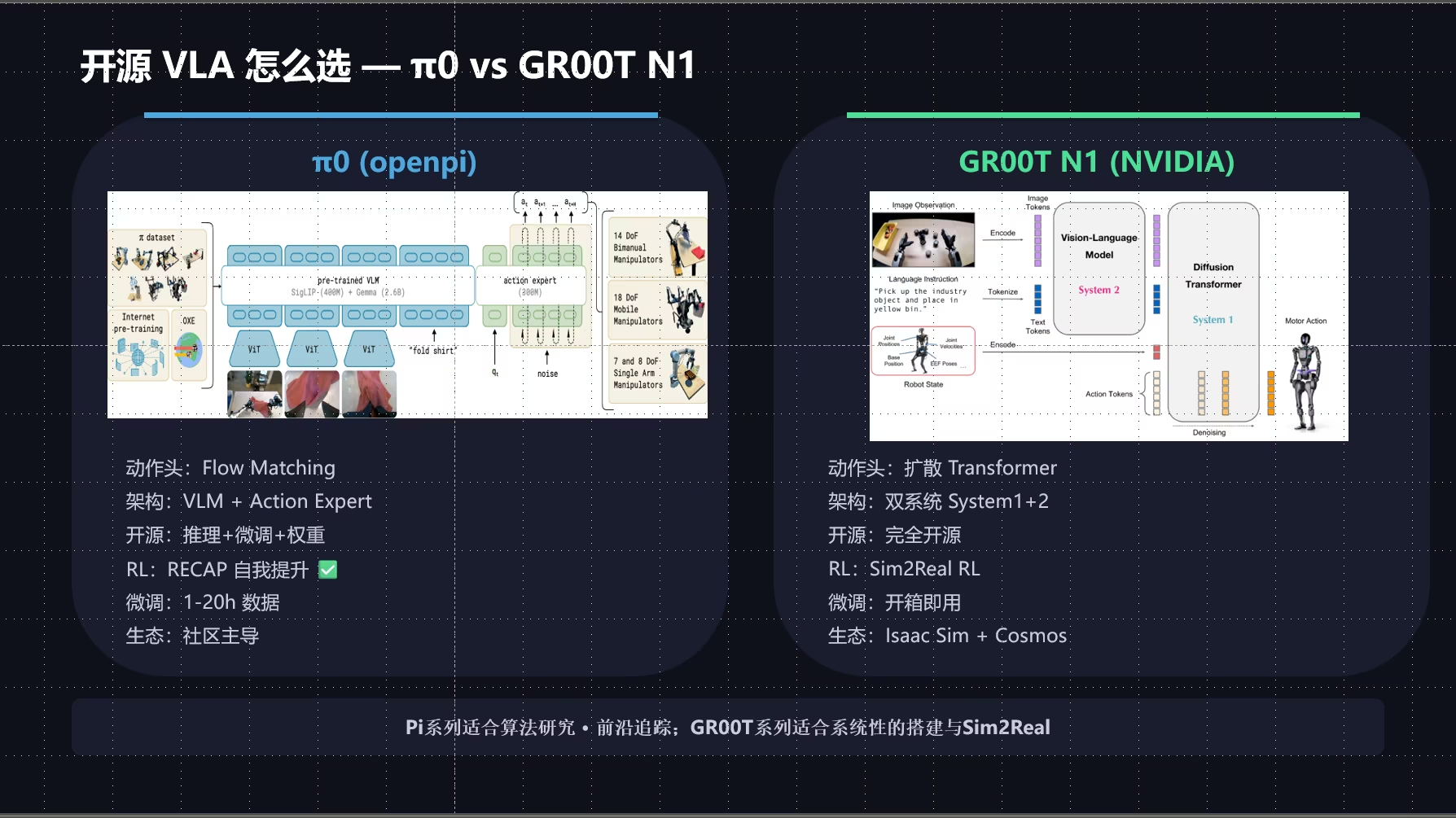
这一页的核心观点是:
当前开源具身智能路线已经不止一条,不同路线的重点不同;选择哪条路线,取决于你是偏算法研究,还是偏系统落地与 Sim2Real。
# 1. π0 路线的特点
PPT 中给出的 π0 特征包括:
- 动作头:Flow Matching
- 架构:VLM + Action Expert
- 开源:推理、微调、权重
- RL:支持 RECAP
- 微调:1-20h 数据
- 生态:社区主导
从这些特点可以看出,π0 更强调:
- 前沿算法路线
- VLA 架构创新
- 低门槛微调
- 社区快速迭代
因此,π0 更适合:
- 跟踪最新具身智能论文
- 做 manipulation 方向研究
- 做开源 VLA 微调实验
- 从小规模真实数据快速起步
# 2. GR00T N1 路线的特点
PPT 中给出的 GR00T N1 特征包括:
- 动作头:扩散 Transformer
- 架构:双系统 System 1 + 2
- 开源:完全开源
- RL:Sim2Real RL
- 微调:开箱即用
- 生态:Isaac Sim + Cosmos
这说明 GR00T 更强调:
- 系统级平台整合
- 仿真与现实协同
- 人形机器人和平台化能力
- NVIDIA 生态支撑下的工程闭环
因此,GR00T 更适合:
- 想做完整系统搭建
- 依赖仿真平台加速开发
- 做 Sim2Real 迁移
- 偏工程平台化部署
# 3. 这一页真正的意思
这页并不是简单比较哪个更强,
而是在提醒读者:
开源 VLA 已经进入路线分化阶段。
也就是说,未来不会只有一个统一答案,
而会出现不同生态下的不同主线:
- 一条偏社区、偏研究、偏 manipulation 的路线
- 一条偏平台、偏系统、偏仿真到现实的大工程路线
所以选择框架时,
关键不是“谁最好”,
而是“谁更适合你的目标”。
# 九、World Model:先在脑子里模拟,再动手
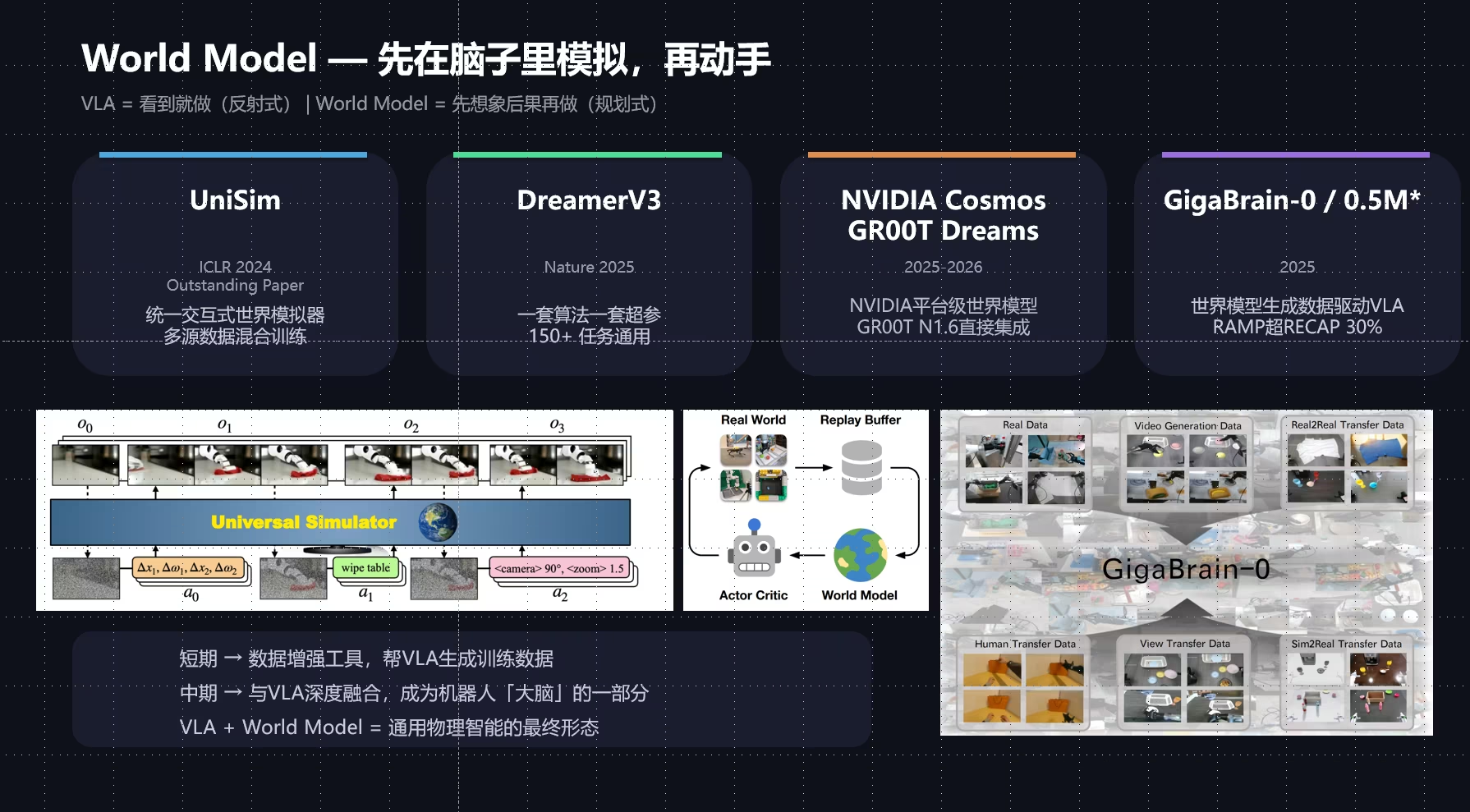
这一页的核心观点是:
VLA 更偏“看到就做”的反射式策略,而 World Model 的目标是让机器人先预测未来后果,再选择动作。
因此,World Model 被看作具身智能下一阶段的重要方向。:contentReferenceoaicite:4
# 1. 为什么 VLA 还不够
VLA 的优势在于:
- 感知、语言、动作统一
- 端到端建模能力强
- 多任务泛化能力好
但它仍然更像一种“反应式系统”:
- 看见当前场景
- 理解当前任务
- 立刻输出动作
这在很多任务上已经足够强,
但在更复杂、长时序、需要规划和试错的任务中,
仅靠当前观测直接反应可能还不够。
因此,下一步自然会提出一个问题:
机器人能不能在行动前,先想象一下结果会怎样?
# 2. World Model 的核心思想
World Model 的核心思想是:
学习一个内部世界模型,用来预测动作会带来什么后果。
这样机器人就不再只是“看见就做”,
而是可以:
- 先模拟未来可能状态
- 比较不同动作的结果
- 再选择更优动作
也就是说,它让机器人开始具备:
- 预测能力
- 规划能力
- 更长时域的决策能力
# 3. 这一方向的意义
PPT 中提到:
- 短期:World Model 可作为数据增强工具
- 中期:与 VLA 深度融合
- 长期:成为机器人“大脑”的一部分
这说明 World Model 当前并不一定是直接替代 VLA,
而更像是在逐步增强 VLA:
- 先帮助生成更多训练数据
- 再帮助提升泛化和规划
- 最终与动作策略深度耦合
因此,它的真正意义在于:
把机器人从“高水平反射”进一步推进到“具备内部预测和想象能力”。
# 4. 代表性方向
PPT 中列出的方向包括:
- UniSim
- DreamerV3
- NVIDIA Cosmos / GR00T Dreams
- GigaBrain
这些工作虽然路径不同,
但共同目标都是:
让机器人能通过内部世界建模,获得更强的规划、生成和泛化能力。
# 十、新手路径

# 十一、未来展望:这个领域接下来往哪走
- VLA + RL 将推动机器人持续学习
- 数据飞轮会成为比单纯算法更关键的竞争点
- VLA 与 World Model 的融合可能通向更通用的物理智能
- 开源生态会继续加速整个领域发展
所以,这一页的核心可以概括为:
具身智能的未来,不只是更大模型,而是更强数据闭环、更强自我提升能力,以及更完整的预测—行动统一架构。
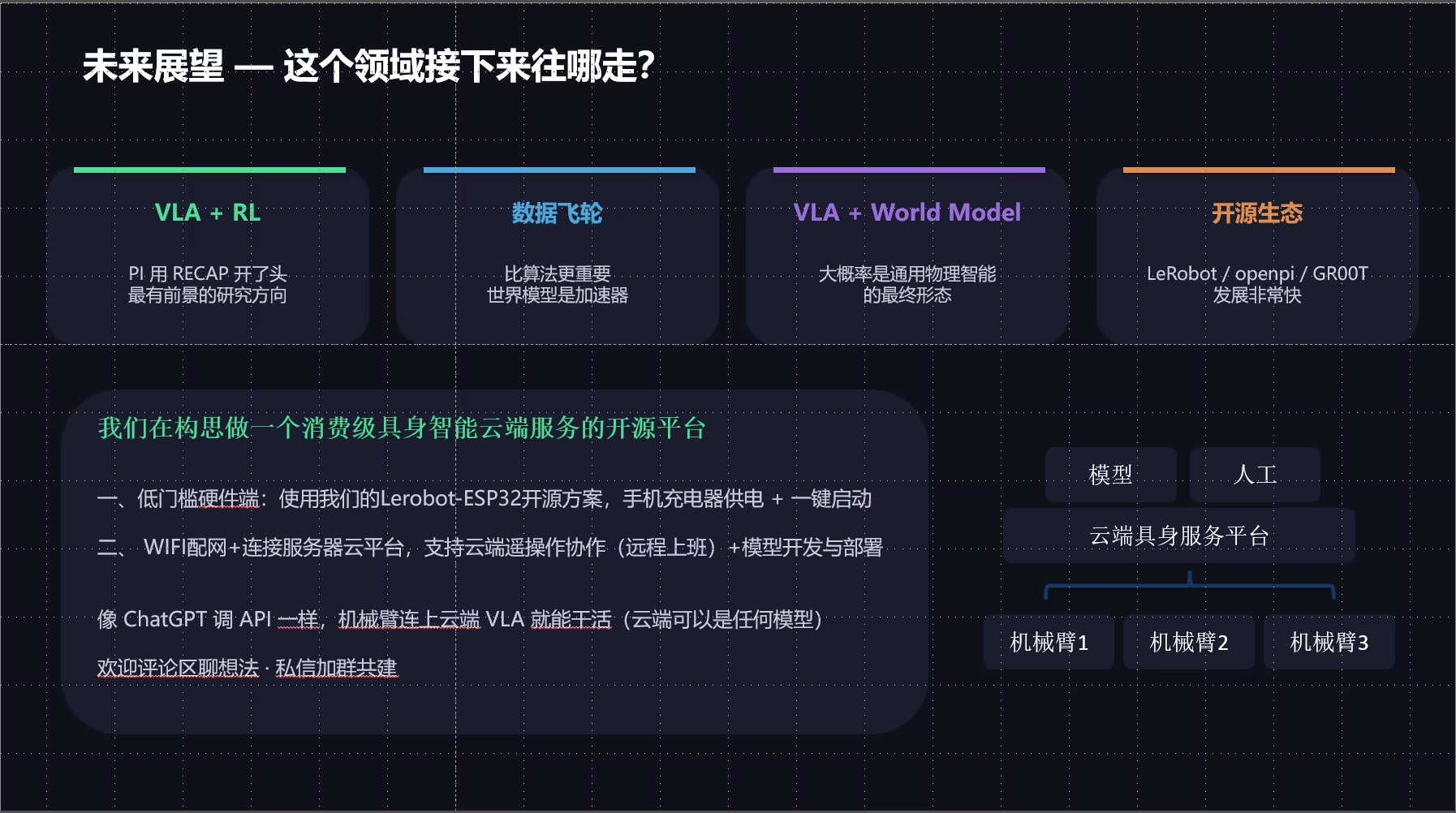
# 1. VLA + RL
PPT 认为:
- PI 用 RECAP 开了头
- VLA + RL 是最有前景的研究方向之一
这说明未来一个重要趋势是:
机器人不再只依赖离线示教,而是开始从部署中继续提升。
这会推动具身智能从静态模仿系统走向持续学习系统。
# 2. 数据飞轮
PPT 特别强调:
数据飞轮比单纯算法更重要。
这是因为在具身智能里,
数据不仅难采,而且决定了:
- 泛化上限
- 场景覆盖范围
- 模型适应能力
- 真实部署效果
所以未来谁能建立更高效的数据采集、筛选、纠错、回流机制,
谁就更可能建立优势。
# 3. VLA + World Model
PPT 给出的判断是:
VLA + World Model 很可能是通用物理智能的最终形态。
这个判断背后的逻辑是:
- VLA 擅长感知理解与动作输出
- World Model 擅长未来预测与规划
- 两者结合,更有可能形成完整的机器人智能闭环
因此,这很可能是未来几年最重要的融合方向之一。
# 4. 开源生态加速
PPT 中强调:
- LeRobot
- openpi
- GR00T
这些开源生态发展很快。
这意味着未来具身智能不会只由少数大厂封闭推动,
而会越来越依赖:
- 开源框架
- 社区协作
- 可复现系统
- 云端部署与共享平台
