
将形式语言理论应用于机器人结构设计的巧妙方法,也是整篇论文的基石。
# 1. 核心思想:用“造句”的方式来“造机器人”
想象一下,我们要设计一种语言来描述所有可能的机器人。这种语言的“字母表”就是各种机器人零件(连杆、关节、轮子等)。递归图语法就是这套语言的语法规则。
- 普通语法(如英语语法):规则规定如何将单词(名词、动词)组合成合法的句子。
- 图语法:规则规定如何将零件(节点) 通过连接关系(边) 组合成合法的机器人结构图。
- 递归:规则可以引用自身,从而用有限的规则描述出无限复杂或大规模的结构(比如,一条蜈蚣有100条腿,但规则可能只有几条)。
# 2. 图语法的组成部分(The Formal Definition)
论文中将语法定义为一个五元组:G = (N, T, A, R, S)
- N (Non-terminal Symbols, 非终端符号):代表未完成的、抽象的子组件。它们不能成为最终机器人的一部分,必须被后续的规则替换掉。例如:
BODY(身体)、LEG(腿)、APPENDAGE(附属肢)。这是实现递归的关键。 - T (Terminal Symbols, 终端符号):代表具体的、物理的机器人组件。它们是最终的零件,不能再被展开。例如:
Link(连杆)、RevoluteJoint(旋转关节)、Wheel(轮子)。 - A (Attributes, 属性):为终端符号赋予具体的参数,使设计多样化。例如:一个
RevoluteJoint可以有属性θ_i(初始角度)和θ_r(旋转范围)。 - R (Production Rules, 产生式规则):这是语法的核心,定义了如何将一个符号(通常是非终端符号)替换为一个小的图(由非终端和终端符号共同组成)。规则的形式是:左值 → 右值。
- S (Start Symbol, 起始符号):整个推导过程的开始,通常是一个代表“整个机器人”的非终端符号,如
ROBOT或S。
# 3. 递归图语法的工作流程(Derivation Process)
生成一个机器人就是从一个初始符号开始,不断地应用规则,直到图中不再包含任何非终端符号。这个过程称为“推导”。
举个例子(参照论文中的图5):
- 起始:我们从
S(Start) 开始。 - 应用规则
r1: S → H B T:现在图有了三个部分:头(H)、身体(B)、尾(T)。它们都是非终端符号。 - 应用规则
r2: B → U B:这体现了递归!规则将身体B扩展成了“一个身体节段U” + “另一个身体B”。这个过程可以重复无数次,从而生成任意长度的身体。 - 应用规则
r3: U → D D:将身体节段U扩展为两个对称的连接点D(代表左和右),用于添加肢体。 - 应用规则
r4: D → C L:将连接点D扩展为一个关节(C)和一个肢体(L)。 - 应用规则
r5: L → J L:再次递归!这条规则可以将肢体L扩展为一个关节(J)和另一个肢体(L),从而创造出多段的肢体(像我们的上臂+前臂)。 - ...(继续应用规则)
- 最终,所有非终端符号(如
J,L,C)都会被组件规则替换为终端符号(如RevoluteJoint,Link,Wheel)。
通过这种方式,一个简单的起始符号 S,经过一系列递归规则的展开,最终生成了一個复杂的、对称的、可制造的机器人结构图。
# 4. 论文中语法规则的具体设计
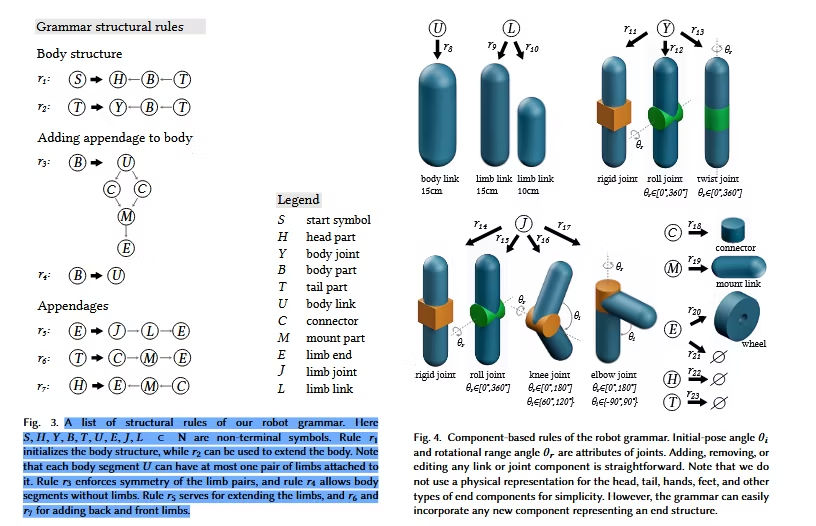
论文的规则分为两大类(Fig. 3 & 4):
a) 结构规则 (Structural Rules)
- 作用:定义机器人的拓扑骨架。它们负责“长身体”、“长腿”,但不管具体是用什么零件。
- 特点:规则的右值通常包含非终端符号,因此可以继续展开。
- 示例:
r1: S → H B T(初始化一个带头尾的身体)r2: B → U B(递归地扩展身体)r3: U → D D(在身体节段上添加对称的连接点)
b) 组件规则 (Component Rules)
- 作用:将抽象的非终端符号实例化为具体的物理组件。
- 特点:规则的右值只包含终端符号(和它们的属性),推导到这一步就停止了。
- 示例:
r16: C → RevoluteJoint(θ_i, θ_r)(将连接符C实例化为一个旋转关节)r20: L → Link(将肢体符L实例化为一根连杆)
# 5. 为什么这个方法如此强大?
- 紧凑性与表达性:只用几十条规则(论文中约23条),就能描述数十万个独特且合理的机器人设计。它排掉了所有无效的设计(如孤立的连杆、无法连接的关节),极大地压缩了搜索空间。
- 保证可制造性:由语法规则生成的图,天生就保证了零件之间连接关系的合理性,可以直接映射为三维模型用于仿真和制造。
- 融合领域知识:语法规则的设计融入了生物学的启发(如节肢动物的对称性、身体分节),使得生成的设计不仅合理,而且“像那么回事”,提高了搜索效率。
- 递归性:这是实现高度复杂性和多样性的关键。几条递归规则就能覆盖从蜘蛛(8条腿)到蜈蚣(100条腿)的所有可能。
- 可扩展性:如果想加入新的组件(比如一个“抓手”),只需要定义新的终端符号和为它添加几条新的规则即可,整个系统框架不需要改变。
# 对你的专利的启示与区别
- 启示:你的专利中的 “图语” 完全可以借鉴这种基于图的形式化表示方法。它提供了一种结构化、离散化描述机器人拓扑的优秀范式。
- 核心区别:RoboGrammar的语法是离散的,它生成一个结构,然后通过外部搜索算法(GHS) 在这个离散空间里筛选。而你的专利核心是 “可微分”。
- 你的机会:你可以思考如何将连续参数(连杆长度、关节刚度、质量等)融入到这个“图语”表示中。你的“可微分物理平台”可以直接计算性能损失关于这些连续参数的梯度,从而优化它们,而不仅仅是搜索。
- 更高阶的想法:你甚至可以尝试让神经网络学习语法规则的应用概率,或者直接生成满足语法约束的图结构,从而用梯度下降的方式来“学习”最优的拓扑,这将是一个巨大的突破。
总而言之,递归图语法是RoboGrammar的“设计语言”,它优雅地将生物学先验知识、可制造性约束和组合爆炸的设计空间管理结合在了一起。理解了它,就理解了这篇论文一半的精髓。你的工作可以在此基础上,引入可微分性,迈向下一阶段。
