
# 一、嵌入式系统的定义与发展
# 1️⃣ 定义
- 核心定义:
嵌入式系统是以应用为中心,以现代计算机技术为基础,能够根据用户需求 ,如功能、可靠性、成本、体积、功耗、环境等灵活裁剪软硬件模块的专用计算机系统。 - 中国国家标准 GB/T22033-2008:
置入应用对象内部,起信息处理和控制作用的专用计算机系统。 - IEEE 定义:
用于控制、监测或辅助设备运行的装置。 - 维基百科定义:
嵌入到机械或电气系统中的计算机控制系统,具有实时性。
延伸理解:
嵌入式系统不是通用计算机(如 PC),它通常“藏”在设备内部(如手机、洗衣机、无人机、工业控制器等)。其本质是一种特定任务的计算机,例如 STM32 微控制器控制电机或传感器。
# 2️⃣ 发展阶段
| 阶段 | 时间 | 特点 |
|---|---|---|
| 出现 | 1960–1970 | 最早的机载专用数字计算机(Verdan);实现工业直接数字控制 (DDC)。 |
| 兴起 | 1971–1989 | 微处理器出现,嵌入式计算机广泛应用于工业与军用领域。 |
| 繁荣 | 1990–现在 | 嵌入式系统深入工业、通信、汽车电子、家电等领域。 |
- 1971 年 Intel 推出 4004 微处理器,标志着嵌入式计算机时代的开端。
- 随着 IoT(物联网) 发展,嵌入式系统成为智能设备的基础。
# 二、通用计算机 vs 嵌入式系统
| 特征 | 通用计算机 | 嵌入式系统 |
|---|---|---|
| 形式 | 可见计算机(如 PC) | 融入设备内部,不以计算机形态出现 |
| 组成 | 通用 CPU;标准总线 + 外设;软硬件相对独立 | 专用 MCU;总线、外部接口集成在处理器内部;软硬件紧密结合 |
| 开发方式 | 本机开发 | 交叉开发(PC 上编译 → 下载到目标板) |
| 二次开发 | 可扩展 | 固化程序,不可修改 |
嵌入式系统的不可二次开发性源于程序固化在 Flash 中,适合产品级部署**。但现代系统支持 OTA 更新和可配置固件。
# 三、嵌入式系统分类
- 按处理器位数:4位、8位(51,Arduino)、16位、32位(stm32)、64位。
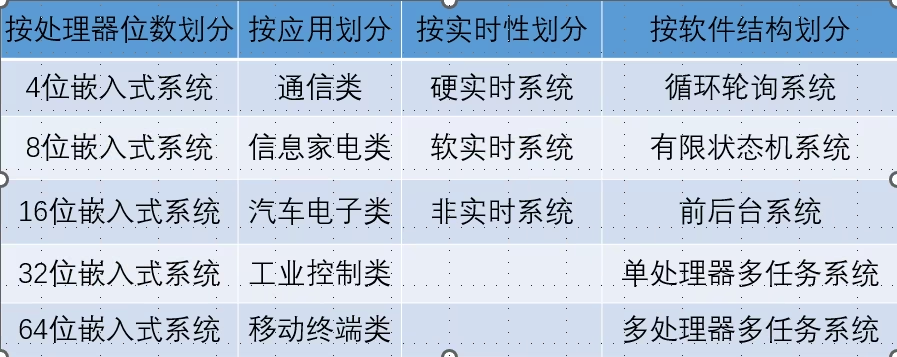
- 按应用:通信类、信息家电、汽车电子、工业控制、移动终端等。
- 按实时性:硬实时、软实时、非实时。
- 按软件结构:循环轮询、状态机、前后台系统、RTOS 多任务系统。
位数:一次处理几位数据
stm32 /32位控制器
51单片机 /8位控制器
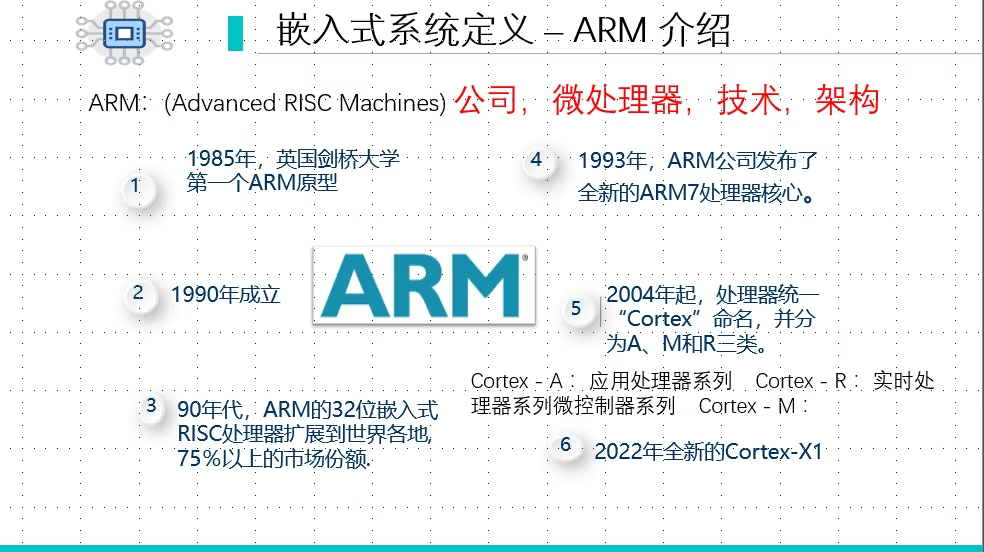
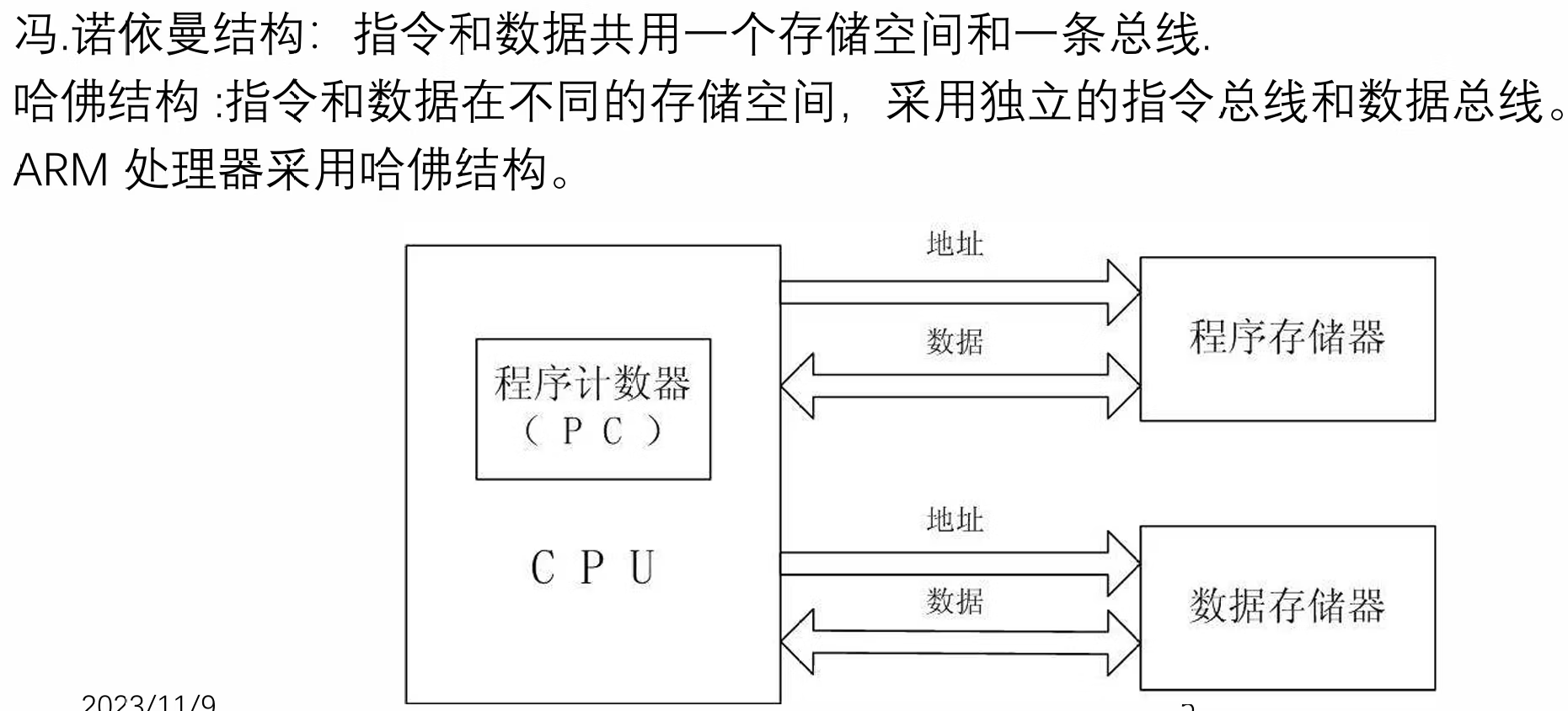
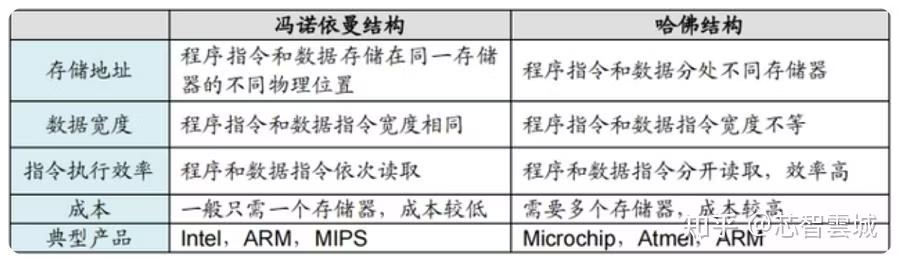
# arm:
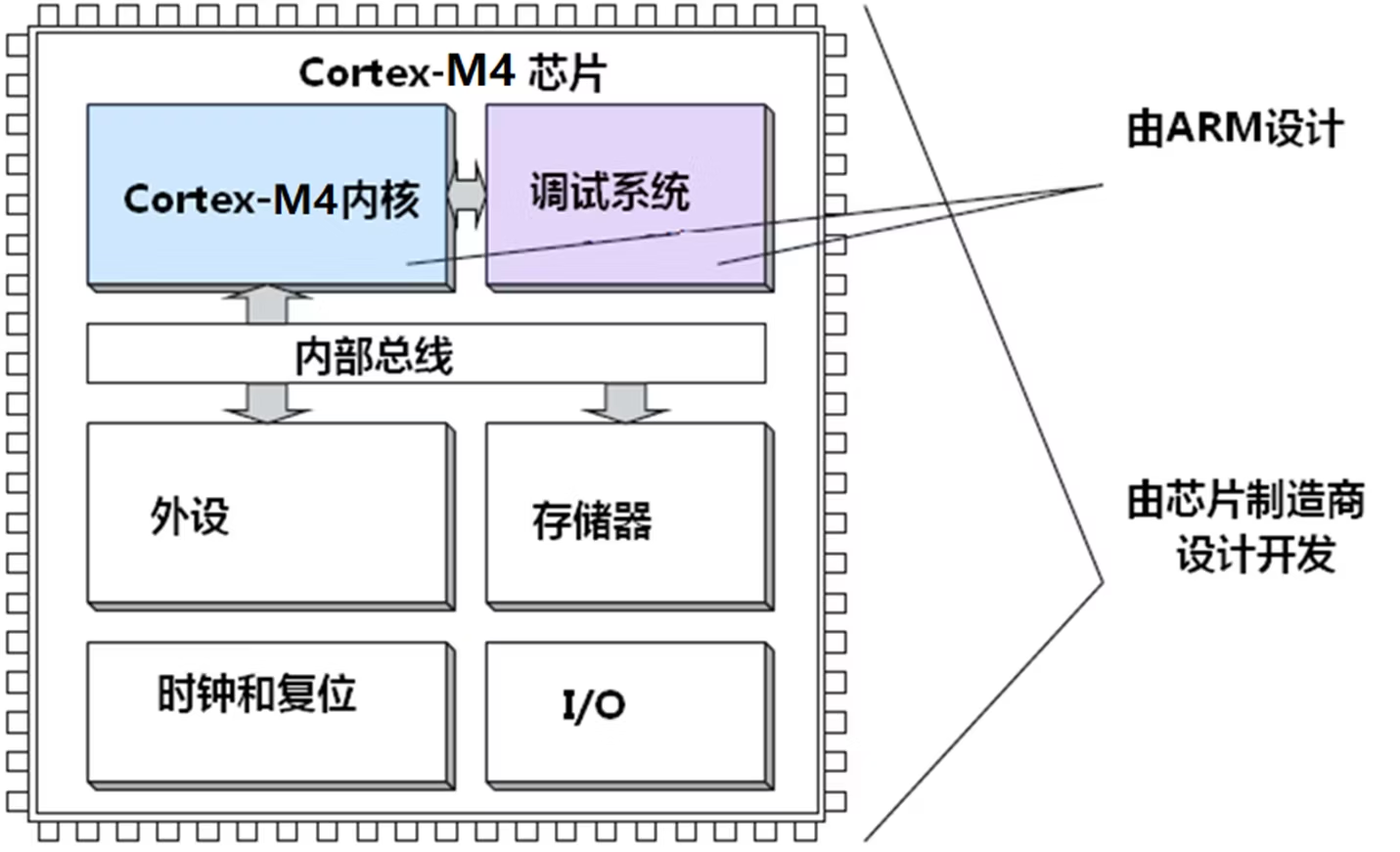
# 芯片结构(f411):
- 现代嵌入式系统多采用 RTOS(实时操作系统),如 FreeRTOS、RT-Thread、Zephyr。
- 在汽车和工业领域,硬实时性是安全关键。
# 四、嵌入式系统特点
- 特定应用性
- 实时性与可靠性
- 多种体系结构(ARM、RISC-V)
- 成本敏感
- 嵌入式操作系统支持
- 专用开发工具链(Keil、STM32CubeIDE)
在物联网时代,系统需兼顾 功耗控制与网络通信(如 BLE、Wi-Fi、CAN、RS485)。
# 第二部分:嵌入式软件开发方式
# 1️⃣ 编程模式
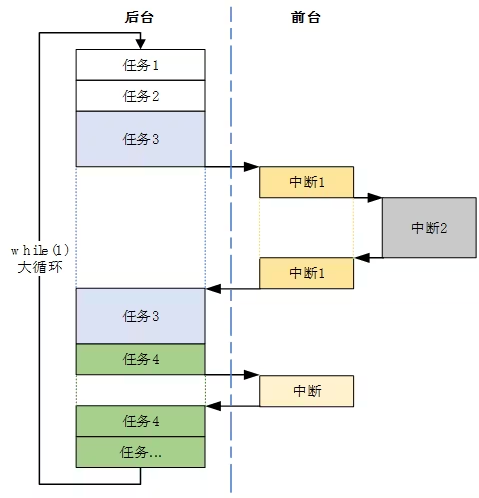
# (1)前/后台系统(裸机系统)
- 主循环负责轮询任务(后台系统):一个无限循环,循环中断相关函数完成所需要的操作
- 中断响应实时事件(前台系统):若干个中断服务程序,用于处理系统的异步事件和实时性要求较高的任务
# (2)嵌入式操作系统(RTOS)
- 提供任务调度、同步通信、内存管理。
- 适合多任务并行与复杂系统。
RTOS 常见功能包括任务调度、信号量、消息队列、内存管理。
# 2️⃣ 程序开发方式
| 方式 | 特点 | 优缺点 |
|---|---|---|
| 寄存器方式 | 直接操作硬件寄存器 | 高效但复杂 |
| 库函数方式 | 使用厂家 HAL 库 | 简单易用,适合工程开发 |
STM32 开发常用:
- HAL(Hardware Abstraction Layer)库
- LL(Low Layer)库
# 第三部分:学习体系与方法
- 硬件基础:最小系统(电源、复位、时钟)。
- 软件基础:GPIO、定时器、中断、串口通信。
- 通信接口:UART、SPI、I²C、CAN、USB。
- 模块化设计:使用扩展板开发。
- RTOS 实践:掌握任务调度与通信。
学习建议:
- 先易后难,从裸机到 RTOS。
- 实践驱动,使用开发板实验。
- 掌握调试手段(串口、逻辑分析仪、仿真器)。
# 第四部分:微控制器 MCU 与 STM32
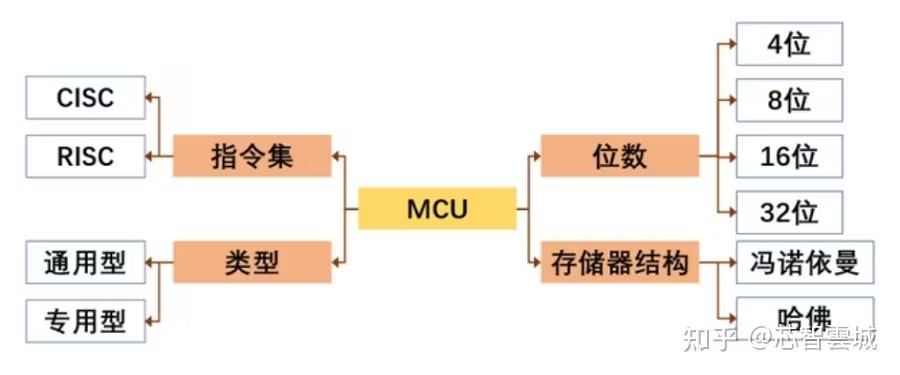
# 1️⃣ MCU 概念

- MCU = Microcontroller Unit = 单片微型计算机
- 集成 CPU、RAM、ROM、I/O、定时器、A/D、D/A
- 常用于控制系统核心部分
MCU 与 MPU 区别:
- MCU:资源有限,控制导向(STM32、51)
- MPU:带 MMU,应用导向(树莓派)
# 2️⃣ STM32 系列命名规则
STM32F103RBT6
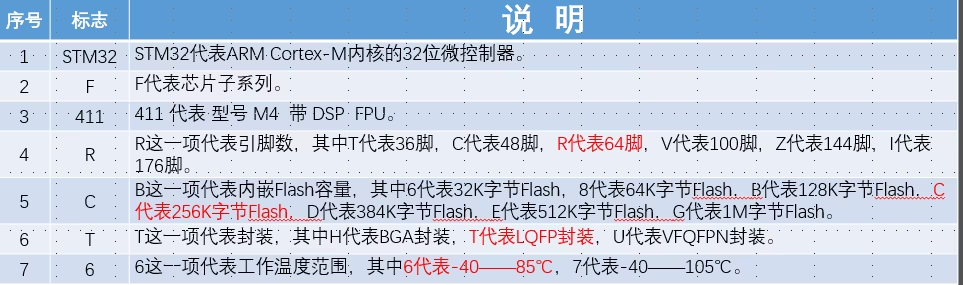
| 项 | 含义 |
|---|---|
| STM32 | ARM Cortex-M 系列 |
| F | 芯片子系列 |
| 103 | 增强型系列 |
| R | 64 引脚封装 |
| B | 128 KB Flash |
| T | LQFP 封装 |
| 6 | -40~85℃ |
# 3️⃣ ARM 架构简述
- Cortex-A:高性能应用处理器
- Cortex-R:实时控制类
- Cortex-M:微控制器系列(STM32 属于此类)
Cortex-M 使用 Thumb-2 指令集,内置 NVIC 支持嵌套中断,具备低功耗与高响应能力。
# 总结
| 模块 | 核心内容 | 延伸理解 |
|---|---|---|
| 嵌入式定义与发展 | 从机载系统到物联网时代 | ARM、RISC-V 引领低功耗趋势 |
| 分类 | 位数、应用、实时性、结构 | RTOS 与非 RTOS 各有适用场景 |
| 特点 | 实时性、可靠性、成本敏感 | IoT 需联网与低功耗设计 |
| 开发方式 | 裸机/RTOS;寄存器/库函数 | HAL 与 LL 结合开发 |
| 学习路径 | 硬件 + 软件 + 调试 + RTOS | STM32CubeMX + FreeRTOS 实践 |
| MCU | STM32 命名与架构 | 理解 Cortex-M4:NVIC、SysTick、FPU |
