
参考:https://www.cnblogs.com/wzzkaifa/p/19031126#一、通信接口
# 一、通信接口分类
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 |
|---|---|---|---|---|---|
| USART | TX、RX | 全双工 | 异步 | 单端 | 点对点 |
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 |
| SPI | SCLK、MOSI、MISO、CS | 全双工 | 同步 | 单端 | 多设备 |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 |
| USB | DP、DM | 半双工 | 异步 | 差分 | 点对点 |
# 细分:
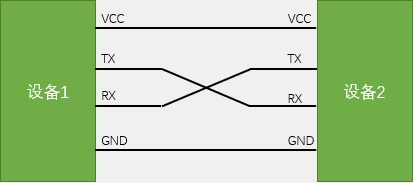
- UART (Universal Asynchronous Receiver/Transmitter): 最基础的点对点串行协议。像两个人面对面聊天。
TX (Transmit): 发数据的引脚。STM32的嘴巴。
RX (Receive): 收数据的引脚。STM32的耳朵。
(可选) RTS/CTS: 硬件流控引脚,用于协调发送速度(防止数据淹没对方)。
(uart是通用异步收/发器,usart通用同步/异步收/发器,相较于UART多一个时钟输出,无时钟输入)
- I2C (Inter-Integrated Circuit): 多设备共享“总线”的低速串行协议。像一个小组讨论,大家共用一条电话线,靠“名字”(地址)区分。
SCL (Serial Clock): 时钟线。由主设备产生,像打拍子指挥节奏。大家共用。
SDA (Serial Data): 数据线。主从设备都通过它收发数据。大家共用。
注意: I2C总线需要上拉电阻(通常4.7KΩ)连接到电源(3.3V),让总线在空闲时保持高电平。
- SPI (Serial Peripheral Interface): 高速全双工串行协议,通常点对点或点对少量设备。像两个人用两条专用电话线同时说和听。
SCK (Serial Clock): 时钟线。由主设备产生,指挥节奏。
MOSI (Master Out Slave In): 主设备发,从设备收的数据线。
MISO (Master In Slave Out): 主设备收,从设备发的数据线。
NSS / CS (Slave Select / Chip Select): 片选线。由主设备控制,低电平有效。拉低哪条线,就选中哪个从设备进行对话。主设备可以有多个CS引脚连接不同从设备。
- USB (Universal Serial Bus): 复杂但强大的通用串行总线协议。
DP (Data Positive)
DM (Data Negative)
专用差分信号线对,需要符合USB规范的硬件设计。
- CAN (Controller Area Network): 主要用于汽车、工业的可靠网络协议。
CAN_H (CAN High)
CAN_L (CAN Low)
专用差分信号线对,需要终端电阻(120Ω)。
通信方式:设备与设备之间的连接方式
# 二、 通信方式:
# 1、串行并行
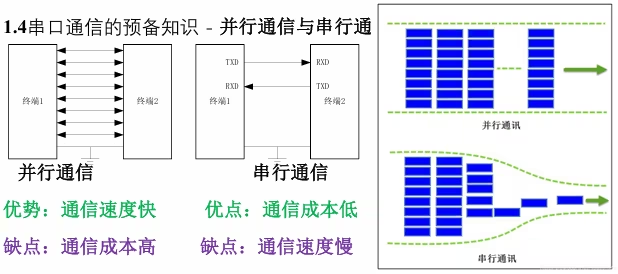
串行 : 一根或几根线,一次传1个比特(bit)。 节省引脚,适合远距离(相对并行),是主流。UART, I2C, SPI, USB, CAN都是串行。
并行: 多根线(如8根, 16根),一次传多个比特(一个字节或字)。 速度快,但引脚占用多,线间干扰大,距离短。STM32内部总线常用,外部用得少了(如老式打印机接口)。
有线 vs 无线:STM32本身通常处理有线协议,无线(如WiFi, BLE)常通过额外模块(如ESP8266, HC-05)用UART/SPI连接STM32。
# 2、双工模式
-
比喻:对话的方向限制。是只能一方说(单工)?还是能轮流说(半双工)?还是能同时说和听(全双工)?
-
**单工: 数据只能单向流动**。例如:只读传感器、广播(电台发送,收音机只能接收)。STM32较少纯粹单工。
-
**半双工: 数据可以双向流动,但同一时间只能一个方向**。就像对讲机,说完“Over”才能听。I2C是半双工 (SDA线同一时刻只能一个设备驱动)。CAN也是半双工 (总线竞争)。
-
**全双工:数据可以同时双向流动。就像打电话,能边说边听**。UART、SPI是典型全双工 (有独立的TX/RX线或MOSI/MISO线)。注意: SPI虽然是物理全双工,但实际应用中,有时从设备在收到主设备命令前并不知道要发什么数据,所以主设备发的可能是命令,从设备发的可能是数据,看起来像半双工,但硬件上具备同时收发的能力。
# 1.3时钟特性
-
比喻:对话的语速或节拍器。
-
同步通信 : 通信双方共用同一个时钟信号来同步数据的发送和接收。主设备提供时钟(SCK/SCL),像指挥拍子。SPI,I2C是同步通信。(没有起始位,停止位!!)
优点: 速度快,抗干扰相对好(因为有时钟边沿采样)。
缺点: 需要额外的时钟线。时钟频率限制通信距离。
- 异步通信: 没有共享的时钟线。双方事先约定好一个速度(波特率),依靠数据帧内部的起始位、停止位来同步每个字节。UART是异步通信。
优点: 只需要两根数据线(TX/RX),适合远距离(相对)。
缺点: 需要精确的波特率发生器,双方波特率误差不能太大(通常<3%),速度相对同步通信慢。更容易受干扰(没有时钟边沿约束)。
-
波特率 (Baud Rate): 衡量异步通信速度的单位,表示每秒传输的符号数(1个符号通常代表1个比特bit)。常用值:9600, 19200, 38400, 115200等。波特率越高,速度越快,但对时钟精度和信号质量要求越高。
-
时钟频率 (SCK/SCL): 衡量同步通信速度的单位(Hz)。SPI可达几十MHz,I2C标准模式100KHz,快速模式400KHz,高速模式3.4MHz等。
# 4、信号传输方式
- 单端信号
用1根信号线 + 公共地线(GND)传输数据。
逻辑状态由信号线对地(GND)的电压差决定:
逻辑1:信号线电压 > 高电平阈值(如3.3V系统为2.0V)
逻辑0:信号线电压 < 低电平阈值(如0.8V)通俗比喻:像一个人用嗓门音量大小传递信息:
大喊(高电平) = 1
小声(低电平) = 0
参考点是环境背景噪音(相当于GND)。
| 优点 | 缺点 |
|---|---|
| 电路简单,成本低(少1根线) | 抗干扰能力差 |
| 功耗较低 | 传输距离短(通常<1米) |
| 适合低速通信 | 地线噪声直接影响信号 |
- 差分信号
用2根相位相反的信号线传输数据(无地线依赖):
D+(正向信号线)
D-(反向信号线)
逻辑状态由两根线之间的电压差决定:
逻辑1:D+电压 - D-电压 > +阈值(如+200mV)
逻辑0:D+电压 - D-电压 < -阈值(如-200mV)通俗比喻:像两个人用反义词对暗号:
A说“高”,B说“低” → 表示1
A说“低”,B说“高” → 表示0>
外界干扰同时影响两人(如噪音+10dB),但暗号差值不变。
| 优点 | 缺点 |
|---|---|
| 超强抗干扰(抑制共模噪声) | 电路复杂(多1根线) |
| 传输距离远(可达百米) | 功耗较高 |
| 高速传输(GHz级) | 成本更高 |
| 降低电磁辐射(EMI) | 需阻抗匹配 |
差异总结
| 特性 | 单端信号 | 差分信号 |
|---|---|---|
| 信号线数 | 1根 + GND | 2根(D+和D-) |
| 抗干扰 | 弱(依赖GND质量) | 极强(抵消共模噪声) |
| 传输距离 | 短(<1米) | 长(可达100米+) |
| 速度 | 低速(通常<10Mbps) | 高速(可达Gbps) |
| 成本 | 低 | 高(多1根线+专用芯片) |
| 噪声辐射 | 高(电流经地线形成环路) | 低(磁场相互抵消) |
# 1.5设备特性
点对点:俩个设备直接传输数据
多设备:需要寻址以确定通信对象
# 三、串口通信

USB转串口模块:芯片型号CH340(将串口协议转换为USB协议),实现串口和电脑通信。
陀螺仪传感器模块:可测量角速度,加速度等姿态参数,左右各四个引脚,一边串口引脚,一边I2C引脚。
蓝牙串口模块:四个角是串口通信引脚,芯片可以和手机互联,实现手机遥控单片机功能
# 硬件电路:
# 电平标准
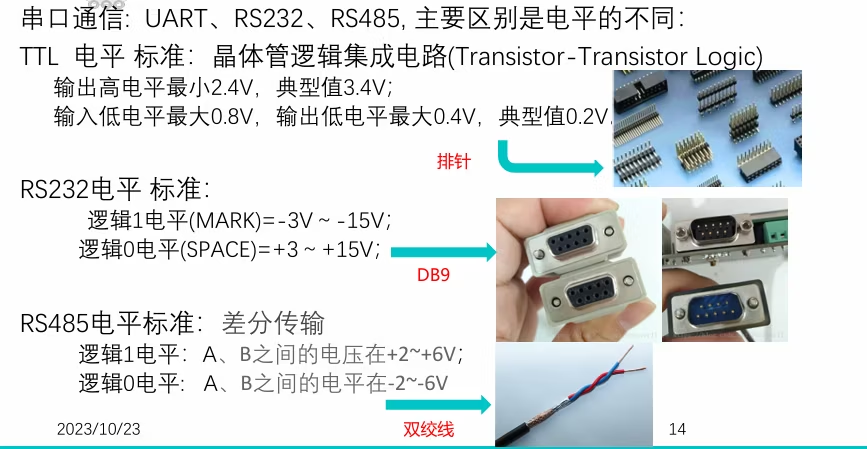
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
- TTL电平:+3.3V或+5V表示1,0V表示0
- RS232电平:-3-15V表示1,+3+15V表示0
一般在大型机器使用,由于环境可能恶劣,静电干扰较大,因此电瓶电压比较大,允许波动范围也大。 - **RS485电平:两线压差+2+6V表示1,-2-6V表示0(差分信号)
差分信号抗干扰能力强。其通信距离可达上千米。
(**TTL ↔ RS232:**必须使用电平转换芯片(如MAX3232)。)
# 串口参数
- 波特率:串口通信的速率
串口一般异步通信,需要双方确定通信速率(波特率,每秒传输码元的个数,二进制情况下,一个码元为一个比特,此时波特率=比特率)。
每位比特(bit)的持续时间 T = 1 / 波特率。
优先选用 11.0592MHz 晶振(可被常用波特率整除)
72MHz系统时钟下,9600波特率误差仅0.14%(推荐)
- 起始位:标志一个数据帧的开始,固定为低电平
- 数据位:数据帧的有效载荷,1为高电平,0为低电平,低位先行
若发送数据超过设定位数,高位会被截断。
- 校验位:用于数据验证,根据数据位计算得来
三种方式:无校验,奇校验(数据位+校验位=奇数个1),偶校验
但是若俩个数据发送过程都出错,奇偶校验就检测不出来错误。
串口助手中,数据位为有效载荷,校验位是独立的1位
- 停止位:用于数据帧间隔,固定为高电平
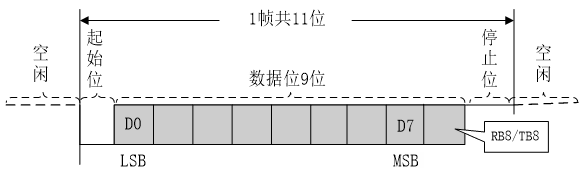
# 串口数据帧整体结构(传输数据最小单位)
串口发送的字节格式,由串口协议规定。
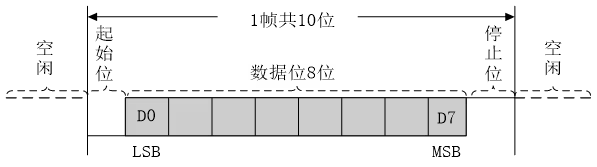
串口每个字节都装载在一个数据帧,每个数据帧都由起始位,数据位和停止位组成。数据位8个代表一个字节8位。
数据帧结构:
空闲态:
- 通信未开始时,TX/RX线保持高电平(逻辑1)。
起始位(Start Bit):
- 1个比特的低电平(0),向接收方宣告“数据开始传输!”
- 关键作用:实现帧同步(接收方检测到下降沿即启动计时)。
数据位(Data Bits):
- 5~9个比特(通常选8位,兼容ASCII)
- 传输顺序:LSB(最低位)先传!
例如发送字符 'A' (0x41 = 二进制 01000001):
实际传输顺序为 1→0→0→0→0→0→1→0(从D0到D7)
校验位(Parity Bit):
- 可选,1个比特,用于检错(不能纠错):
- 奇校验(Odd):数据位+校验位的“1”总数=奇数
- 偶校验(Even):数据位+校验位的“1”总数=偶数。
例:0x41 (01000001)有2个“1”(偶数),若用偶校验则校验位=0
停止位(Stop Bit):
- 1~2个比特的高电平(1) ,表示“本帧结束”
- 强制拉高,为下一帧起始位的下降沿做准备。
# 数据位8位,无校验位:
# 数据位9位,有校验位:
# 串口通信实际波形:
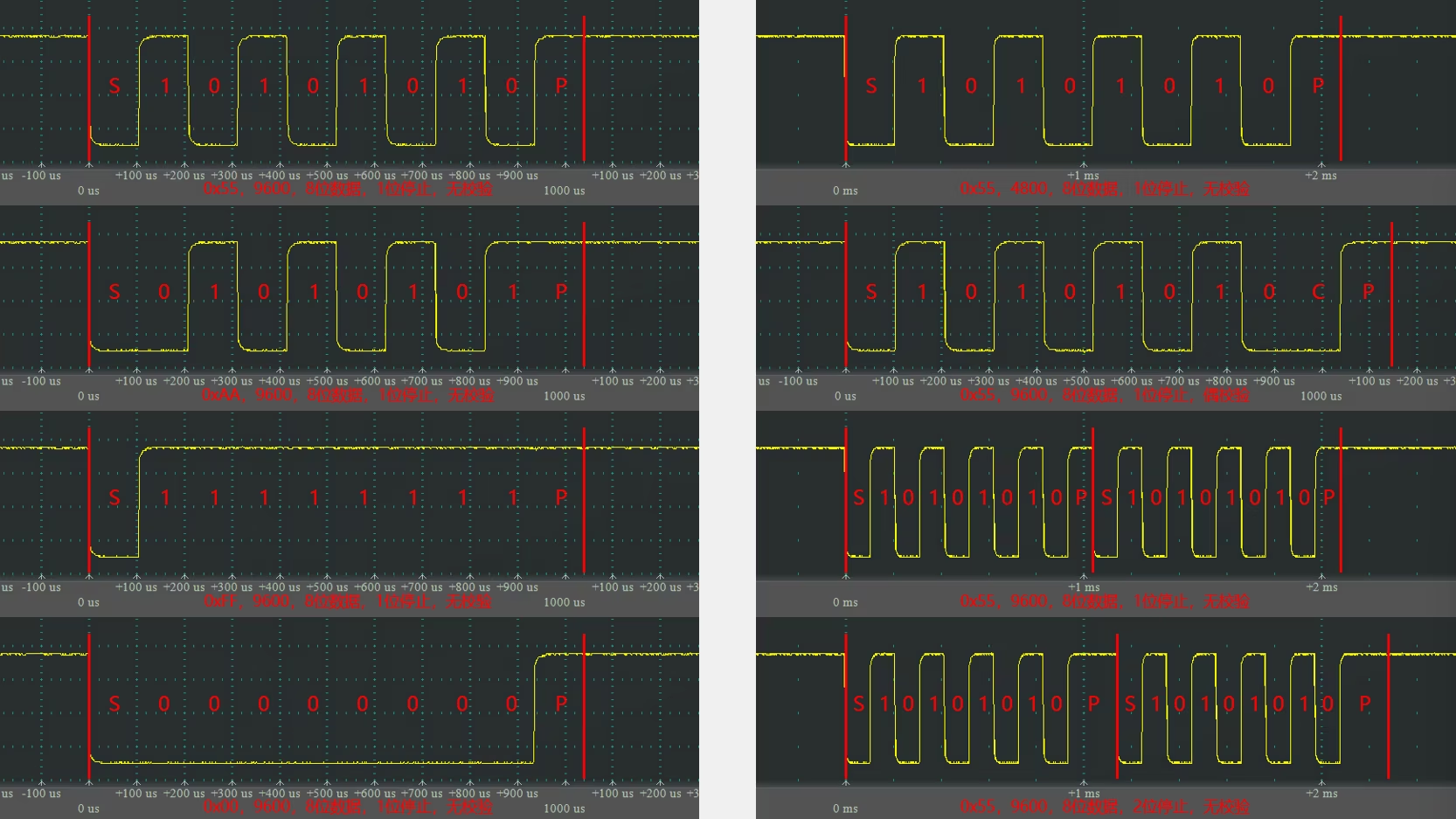
1000 000us/9600 ≈104us,所以为9600波特率(9600bits/s)
# 上面的都是异步:
# 四、USART
- USART(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步收发器
相较于UART模式,多一个时钟输出。>
USART=UART+同步通信扩展功能
USART 与 UART 的本质区别
| 特性 | UART | USART |
|---|---|---|
| 通信模式 | 仅异步 | 同步 + 异步 |
| 时钟线 | 无 | 同步模式需SCLK引脚 |
| 协议支持 | 基础串行协议 | 支持LIN、智能卡、IrDA等 |
| 硬件复杂度 | 简单 | 更复杂(寄存器更多) |
| STM32资源 | 部分型号仅有UART | 主流型号均有USART |
- USART是STM32内部集成的硬件外设,可根据数据寄存器的一个字节数据自动生成数据帧时序,从TX引脚发送出去,也可自动接收RX引脚的数据帧时序,拼接为一个字节数据,存放在数据寄存器里
- 自带波特率发生器,最高达4.5Mbits/s
波特率发生器相当于一个分频器。比如APB2总线72MHz,波特率发生器极性分频,得到波特率时钟(通信波特率),在此时钟下进行接收发送波形。波特率常用9600和115200.
- 可配置数据位长度(8/9)、停止位长度(0.5/1/1.5/2)
- 可选校验位(无校验/奇校验/偶校验)
- 支持同步模式、硬件流控制、DMA、智能卡、IrDA、LIN
- STM32F103C8T6USART资源: USART1**(APB2)、** USART2**、** USART3
# 3.2USART六大高级功能
1.多处理器通信(地址标记)
- 用途:一主多从通信(类似I2C寻址)
- 原理:
发送特殊地址帧唤醒目标从机
从机忽略非自身地址的数据帧 - 配置:USART_CR2 寄存器的 ADD0~3 设置自身地址
2. 硬件流控(RTS/CTS)
- 引脚:
RTS:输出,指示“本机准备好接收”
CTS:输入,检测“对方是否允许发送” - 作用:防止接收缓存溢出(尤其高速传输)
3. LIN总线支持
- LIN Break检测:自动识别13位低电平起始符
- 同步场生成:硬件自动发送 0x55 同步字节
- 配置:USART_CR2 寄存器的 LINEN 使能
4. 智能卡模式(ISO 7816)
- 支持T=0/T=1协议(SIM卡、金融IC卡)
- 自动生成ETU(Elementary Time Unit)时钟
- 硬件校验奇偶错误并重传
5. IrDA红外编码
- 内置编解码器:将数据转为3/16位脉宽红外信号
- 支持SIR(115.2kbps)和MIR(1.152Mbps)速率
6. DMA联动
- 解放CPU:自动搬运大量数据到USART缓存
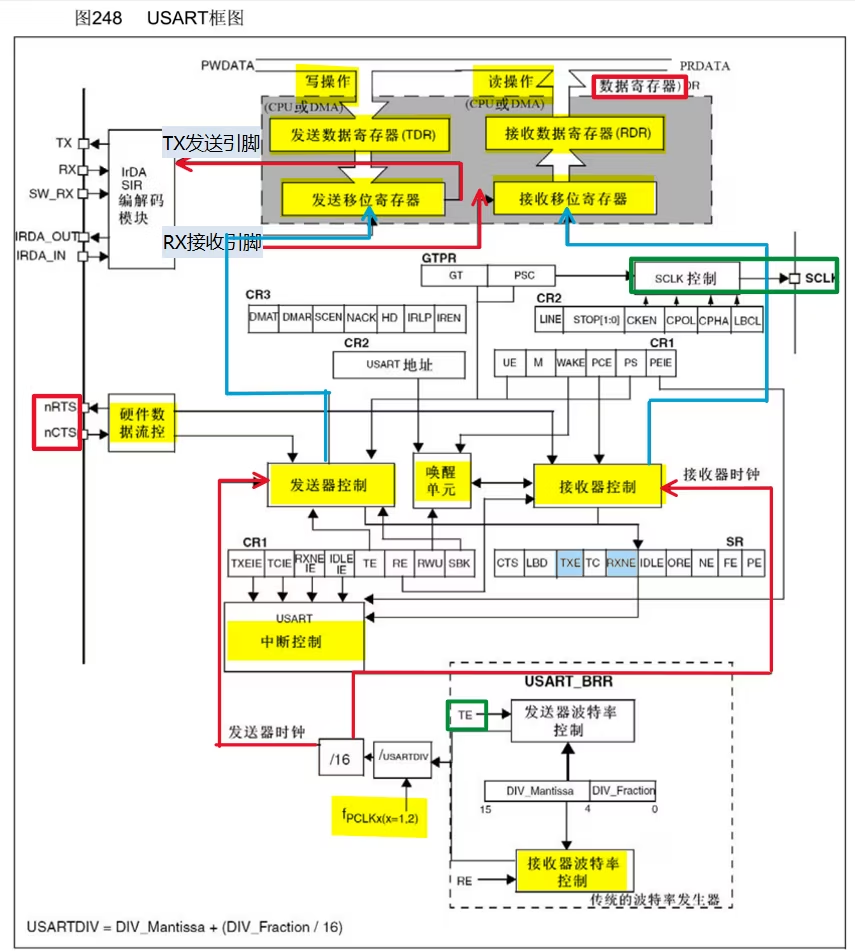
# USART框图
# STM32_USART寄存器精要
| 寄存器 | 作用 | 关键位域 |
|---|---|---|
| USART_SR | 状态寄存器 | RXNE(接收缓存非空), TC(发送完成), PE(校验错) |
| USART_DR | 数据寄存器(读写合一)<br><br>(TDR发送+RDR接收) | 写入数据启动发送,读取获取数据 |
| USART_BRR | 波特率寄存器(16位) | 存储 USARTDIV 值 |
| USART_CR1 | 控制寄存器1 | UE(使能), M(字长), PCE(校验使能) |
| USART_CR2 | 控制寄存器2 | STOP(停止位), CLKEN(同步时钟使能) |
两个数据寄存器——发送数据寄存器 TDR(Transmit DR)和接收数据寄存器 RDR(Receive DR)。两个寄存器占用同一个地址(与51单片机串口的SBUF寄存器相似)。
在程序上只表现为一个寄存器——数据寄存器 DR。但实际硬件中是分成两个寄存器,一个用于发送TDR,一个用于接收RDR。TDR只写,RDR只读。当进行写操作时,数据就写到TDR,当进行读操作时,数据就从RDR读出。
# 发送数据流程
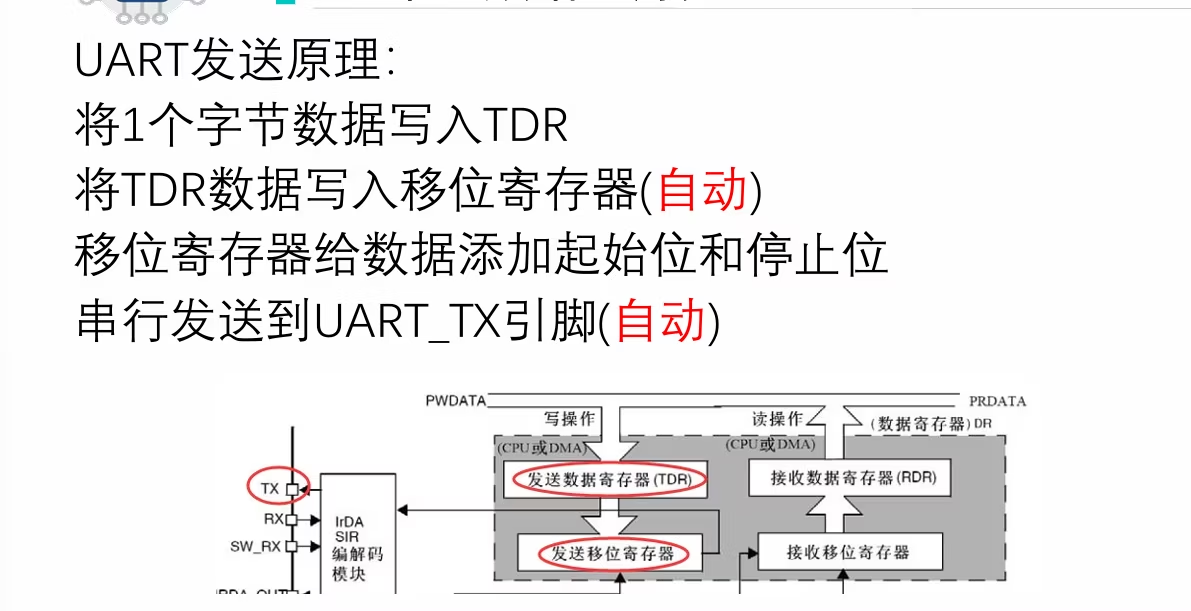
发送数据寄存器TDR:类似于快递站“打包台”(临时存放待发送的快递)
发送移位寄存器:快递站的“传送带”(把包裹逐个送出)
关键状态标志位(USART_ SR寄存器)
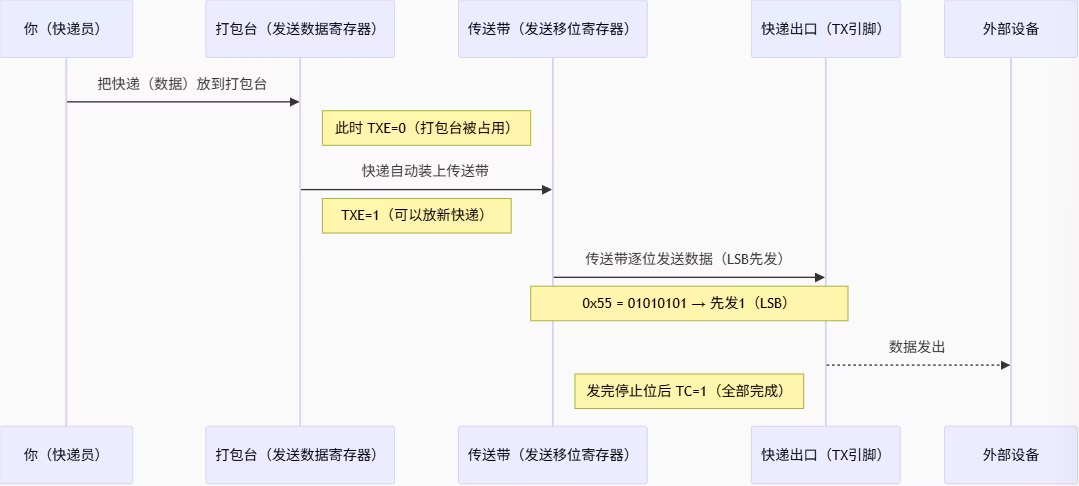
TXE(Transmit Data Register Empty):
- TXE=1:打包台空着,可以放新快递(CPU可写入新数据)
- TXE=1:TDR为空(数据已转移到移位寄存器),可写入新数据
- 写入USART_DR后自动清零
- TXE=0:打包台被占用(正在发送)
TC(Transmission Complete):
- TC=1:所有快递已发出(包括最后的包装盒——停止位)
- TC=1:移位寄存器发送完毕(包括停止位),一帧完成
- 读SR寄存器 + 写USART_DR可清零
- TC=0:还在发送中
- 移位寄存器:像传送带一样,把数据从低位到高位逐个比特推出去
发送数据流程文字描述:
在某时刻给TDR写入0x55,在寄存器中二进制存储0101 0101。此时,硬件检测到写入的数据并检查当前移位寄存器是否有数据正在移位。如果没有,0101 0101全部移动到发送移位寄存器,准备发送。
当数据从TDR移动到移位寄存器时,会置一个标志位****TXE(TX Empty),发送寄存器空。我们检查这个标志位,如果置1了,我们就可以在TDR写入下一个数据了。若TXE=1,数据没有发送,但是数据已经从TDR转移到发送移位寄存器,从而可写入新数据。此时,发送移位寄存器会在发送器控制的驱动下向右移位,一位一位地把数据输出到TX引脚。这里是向右移位的,正好和串口协议规定的低位先行一致。
数据移位完成后,新的数据会再次自动地从TDR转移到发送移位寄存器。如果当前移位寄存器移位还没有完成,TDR的数据就会进行等待,一旦移位完成,就会立刻转移过来。
TDR和移位寄存器的双重缓存,可保证在连续发送数据时,数据帧之间不会有空闲,提高工作效率。简单来说,数据一旦从TDR转移到移位寄存器了,不管有没有移位完成,都立刻把下一个数据放在TDR里等着,一旦移位完成,新的数据就会立刻跟上。
# 接收数据流程
接收移位寄存器: 快递站的“扫描仪”(逐个检查收到的快递)
接收数据寄存器RDR: 快递站的“暂存架”(存放已扫描的完整快递)
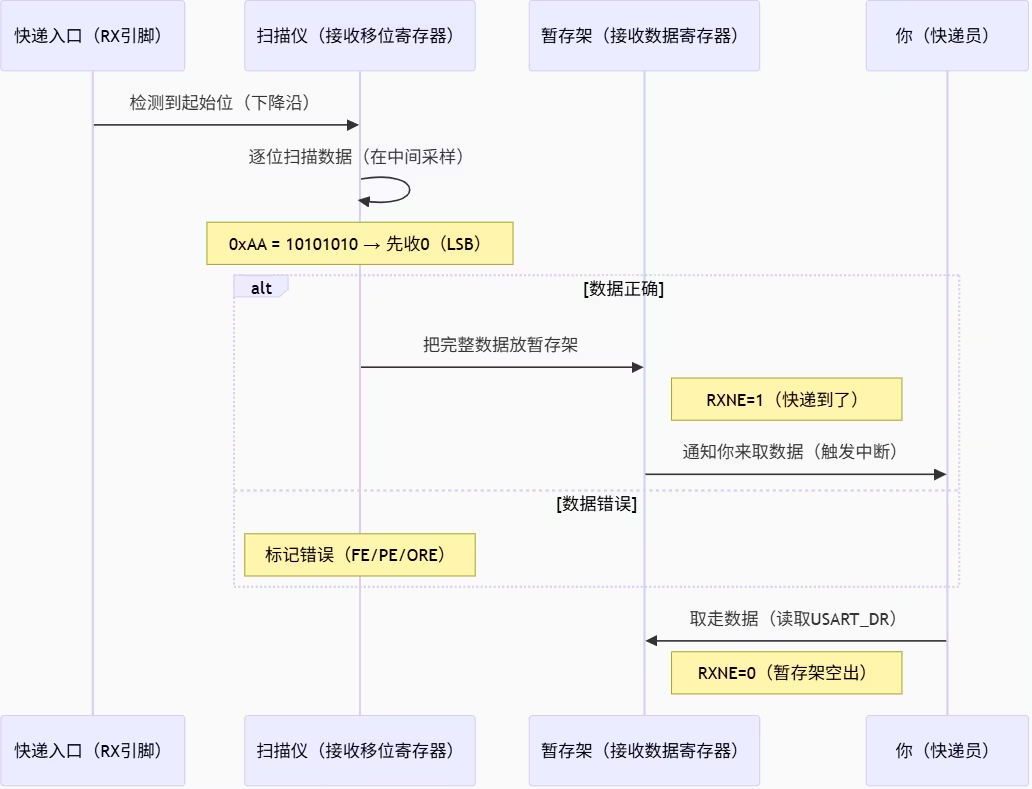
关键状态标志位(USART_SR寄存器)
RXNE=1:暂存架上有快递待取(CPU需及时读取)
移位寄存器:像扫描仪一样,从低位到高位逐个比特组装数据
错误处理:
- 停止位不对 → 标记为"破损快递"(帧错误FE)
- 暂存架未取又来新快递 → 标记"爆仓"(溢出错误ORE)
发送数据流程文字描述::
数据从RX引脚通向接收移位寄存器,在接收器控制的驱动下一位一位的读取RX电平,先放在最高位,然后往右移,移位八次之后就能接收一个字节。由于串口协议规定低位先行,因此接收移位器从高位往低位方向移动。当一个字节移位完成,一整个字节就会转移到接收数据寄存器RDR。在转移过程中产生标志位RXNE,接收数据寄存器非空。当RXNE=1时,可将数据读取。同样俩个寄存器进行缓存,当数据从移位寄存器转移到RDR时,可直接移位接收下一帧数据。
发送有帧头和帧尾,接收需要剔除它们,电路内部自动执行。
# 常见问题:
# Q1: 为什么发送时要先检查TXE?
A:就像快递站——只有打包台空着(TXE=1),才能放新快递,否则会覆盖未处理的快递
# Q2: 数据为什么要从低位(LSB)开始传?
A:就像写数字"123"——先写个位"3",再十位"2",最后百位"1",接收方反过来组装即可还原
# **Q3: 移位寄存器怎么知道何时停止?
A:根据配置的"数据位数"(如8位)——就像扫描仪知道快递单号有几位数字。
# Q4**:为什么发送时要用 TXE 和 TC 两个标志?
TXE=1(打包台空着) 只表示可以放新数据到TDR,但可能还有数据在移位寄存器没发完。
TC=1 (所有快递发送完毕)表示所有数据(包括停止位)已经全部发出。
# Q5**:接收数据时为什么会丢数据?
原因1:CPU没有及时读取 USART_DR(导致 ORE 溢出错误)。
原因2:波特率不匹配(比如STM32设成115200,但对方发的是9600)。
解决方法:
- 使用DMA自动接收数据。
- 确保双方波特率一致。
# Q6**:发送和6接收能同时进行吗?
可以! USART是 全双工 的,发送和接收完全独立(有各自的寄存器和引脚)。
# 五、代码
发送的信息都是&,表示都是地址
HAL_UART_Receive_IT(&huart1, &temp,1);
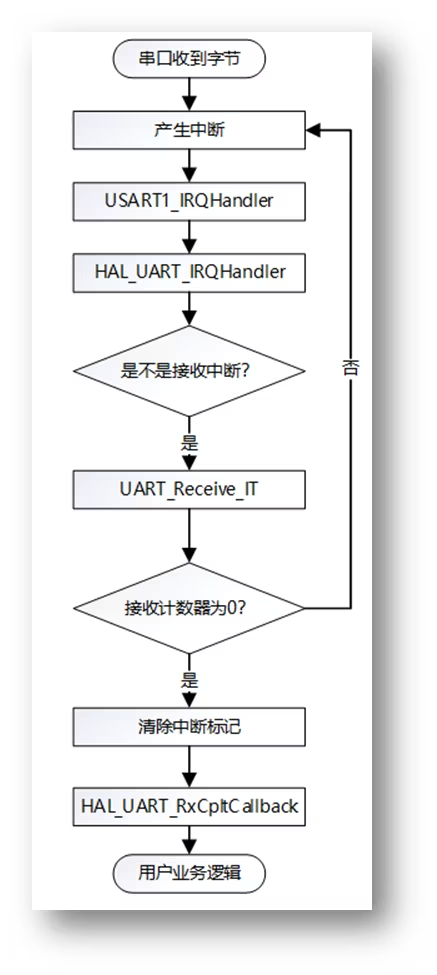
HAL_UART_Transmit(&huart1, &temp, 1, 0xffff);(串口收到字节)RDR寄存器接收到一个字节数据
——》
(产生中断)STM32 的 NVIC(嵌套向量中断控制器)响应 USART1 的中断请求,暂停当前任务,跳转到 USART1 对应的中断服务函数。
——》
(USART1_IRQHandler)作为 USART1 中断的 “入口”,仅负责调用 HAL 库的通用中断处理函数(不直接处理具体逻辑)
——》
(HAL_UART_IRQHandler)HAL 库提供的 UART 通用中断处理函数,读取 UART 的状态寄存器,判断当前中断的类型(是接收中断、发送中断还是错误中断),并分发给对应的处理分支
——》
(判断 “是不是接收中断?”):通过读取 UART 状态寄存器的 “接收数据寄存器非空” 标志位,确认当前中断是否由 “接收字节” 触发。
——》
(UART_Receive_IT)读取接收数据寄存器中的字节、更新 “接收计数器”(用户提前设置的接收长度,每收 1 字节计数器减 1),同时配置下一次接收的中断(若还没接收完)
——》
(判断 “接收计数器为 0?”)用户调用HAL_UART_Receive_IT()时指定的 “要接收的字节数”(比如要收 5 个字节,计数器初始值为 5,收 1 字节减 1)。
UART_Receive_IT:每收到若干个数据,调用一次回调函数;这是因为,每收到一个字节,都会把此函数的接收计数器-1,如果接收计数器为零,调用串口接收回调函数HAL_UART_RxCpltCallback。
HAL_UART_RxCpltCallback:弱函数,在此函数中编写业务逻辑。
while外面
uint8_t rf=0;
uint8_t dat[1]={0xab};
//硬件初始化代码:
//启动一次中断接收
HAL_UART_Receive_IT(&huart1,dat,1); if(rf==1)
{
rf=0;
x=dat[0];
//将x的高低字节交换
dat[0]=(x<<4)|(x>>4);
//查询方式发送
HAL_UART_Transmit(&huart1,dat,1,1);
//启动下一轮中断接收
HAL_UART_Receive_IT(&huart1,dat,1);
}{
if(huart==&huart1)
{
rf=1;
}
}
