
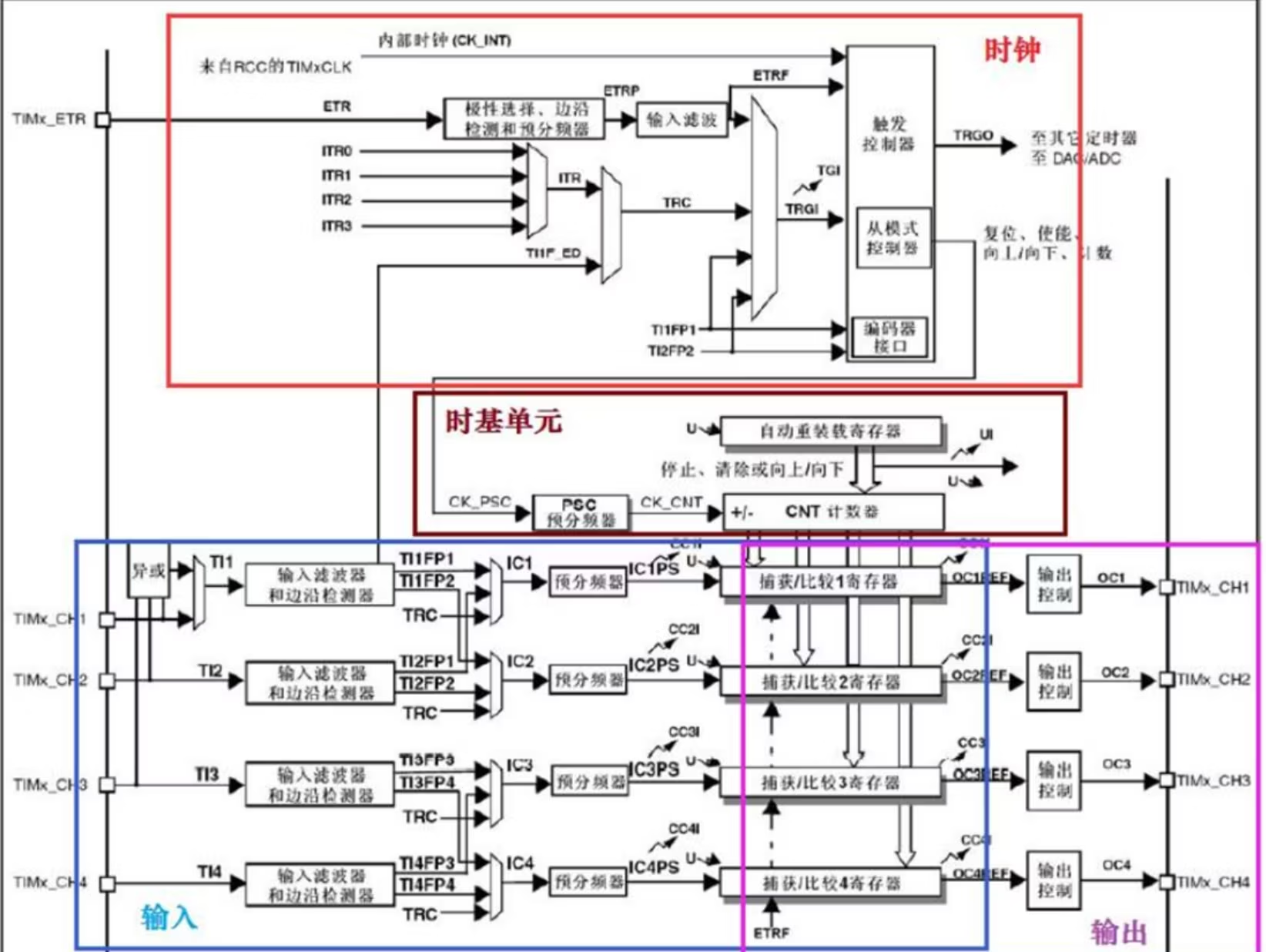
# 定时器:(interal clock别忘记!!)
工作在定时模式时:
内部时钟CK_INT
定时器时钟TIM_CLK
# 1.内部时钟
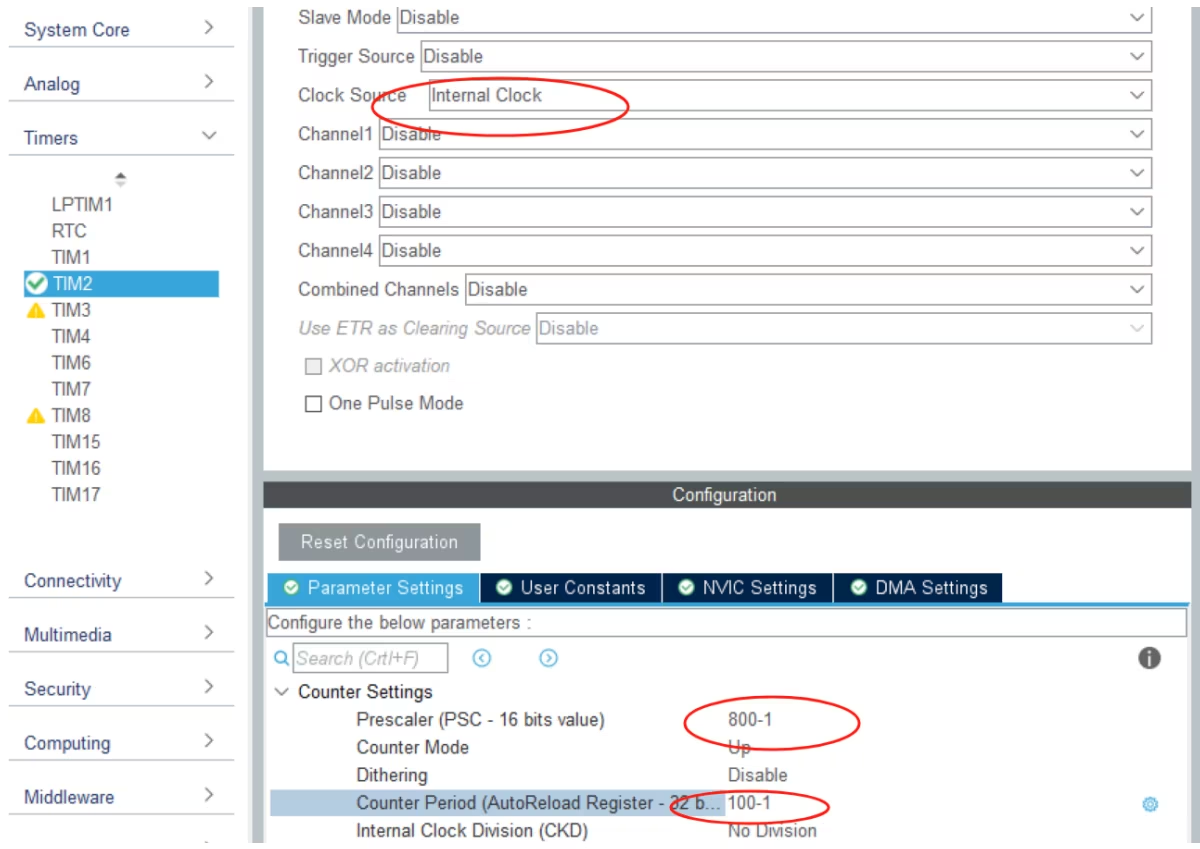
**PSC:**分频,psc/系统主频=计数器的“1”次有多久,
(16 位 PSC 最大值 65535)
**ARR:**周期,多少个psc更新一次
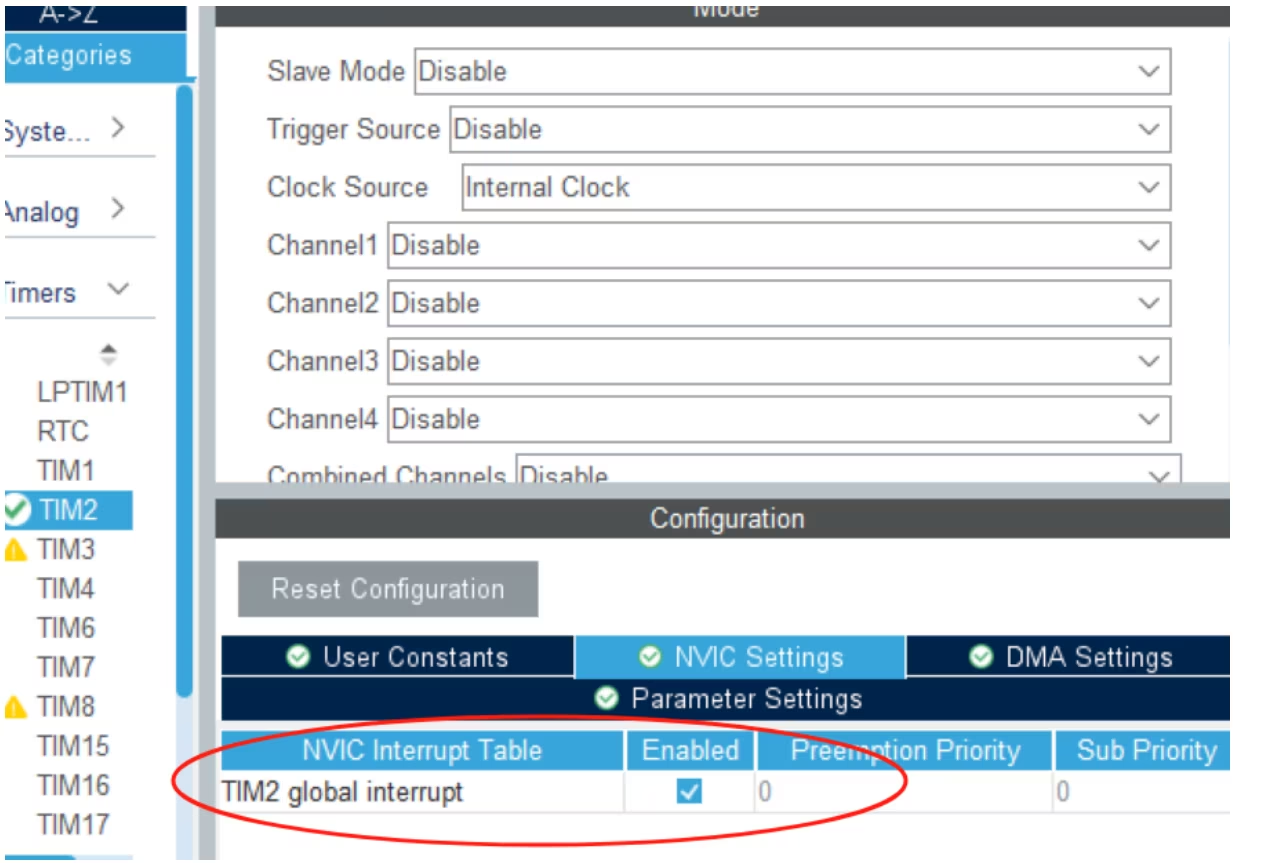
# 定时器代码:
HAL_TIM_Base_Start_IT(&htim2);//打开终端//终端处理函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim2)//if (htim->Instance == TIM2)
{
led_toggle(LED_0);
}
}# 2.外部时钟
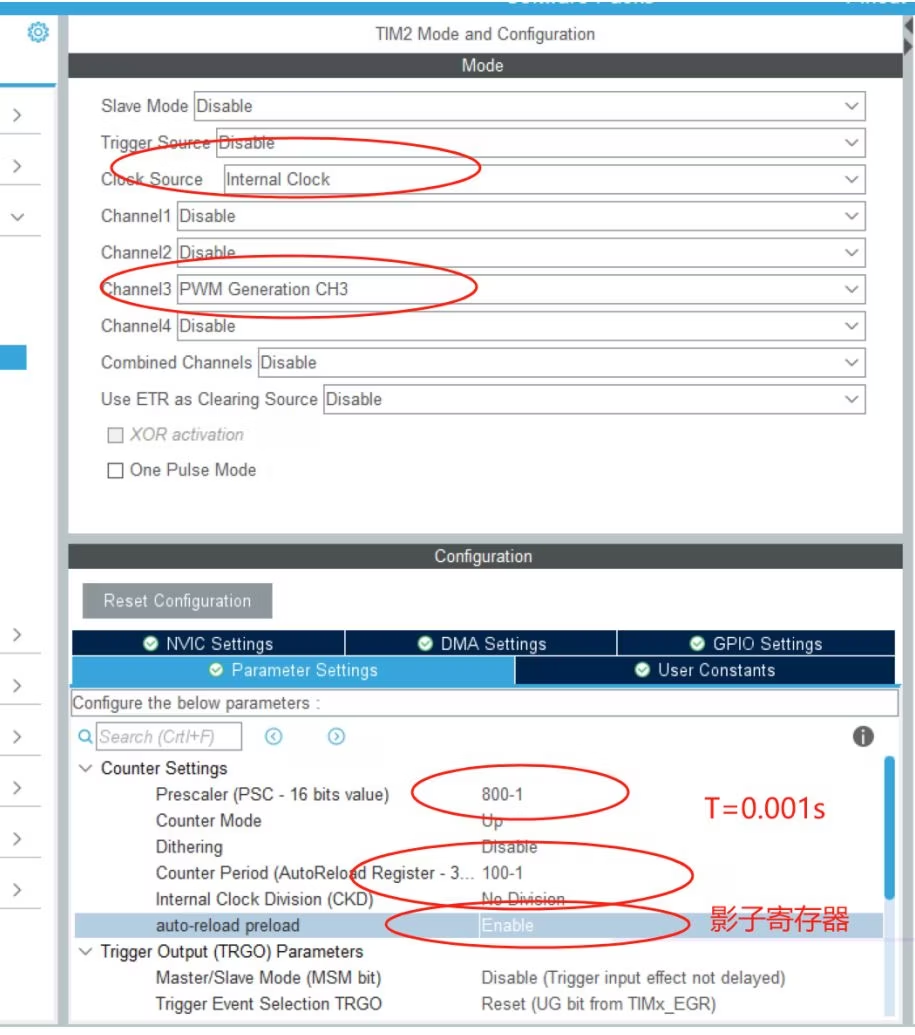
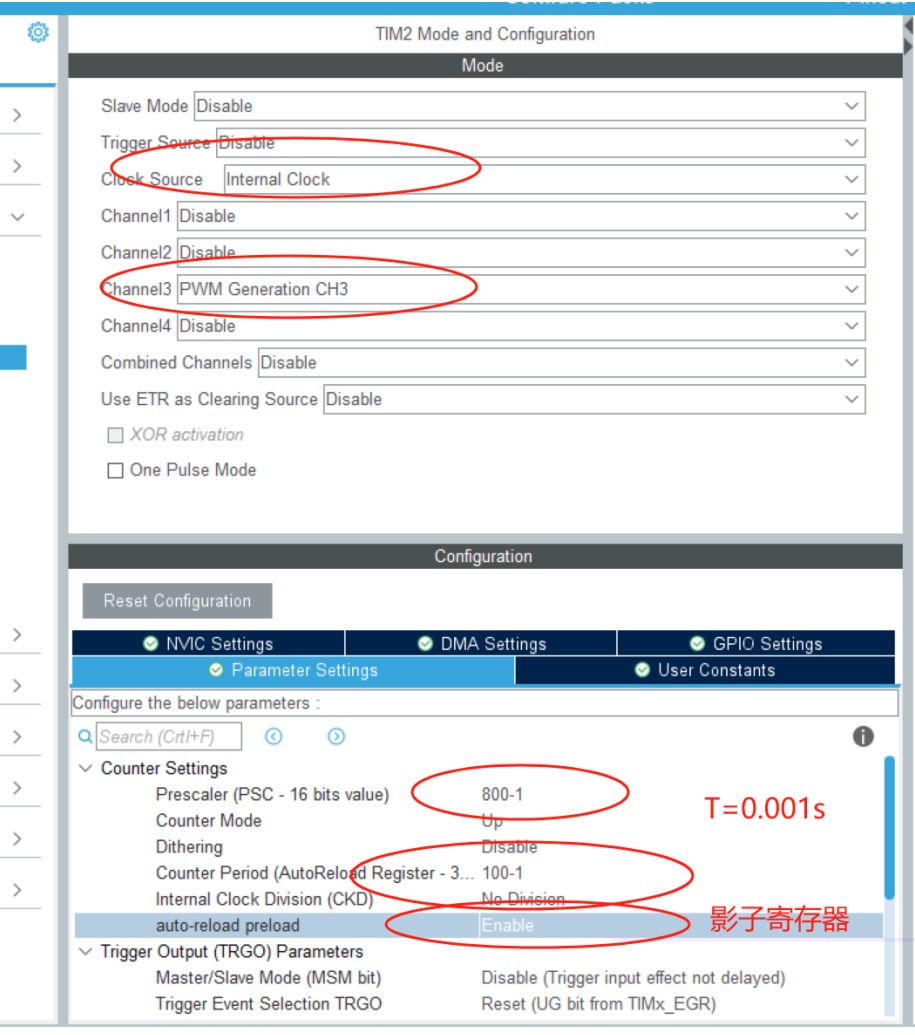
# 3.PWM产生波
# 原理:
ARR(Auto Reload Register):决定 PWM 信号的周期。例如,若 ARR=99,则定时器计数从 0 到 99,形成一个 PWM 周期。
CCR(Capture/Compare Register):决定高电平时间。例如,若 CCR3=50,则输出高电平持续 50 个计数值,对应的占空比大致为 50/100=50%。
预分频器PSC(Prescaler):将系统时钟分频后作为定时器的计数时钟。比如,如果系统时钟为 80MHz,预分频器设为 79,则定时器计数频率为 80MHz/80 = 1MHz,也就是每个计数 1μs。
Auto-reload preload(影子寄存器) :在程序中更新ARR或CRR(即改变占空比时使用),用于“缓冲写入值、延后更新”的硬件机制,能让 STM32 的定时器 在更新参数时更加平滑、安全、同步,避免在关键时刻跳变或抖动。
# 输入捕获模式:
STM32 定时器的输入捕获模式可以捕获信号边沿时定时器的计数值。通常的配置方法是:
- 使用通道1捕获上升沿(标记周期开始),得到一个周期的总计数值(记为 capture1)。
- 使用通道2捕获高电平结束的边沿(例如上升沿到下降沿之间),得到高电平持续的计数值(记为 capture2)。
# CubeMX 配置:
- TIM2 配置(PWM 输出):
- 模式:选择 PWM Generation
- 通道:配置 CH3 为 PWM 输出
- 设置 ARR、CCR3、预分频器等(例如 ARR=99, CCR3=50, Prescaler=79)
- TIM3 配置(输入捕获):
- 模式:选择 PWM Input 模式
- 通道:配置 CH1 捕获上升沿,CH2 捕获下降沿
- 设置预分频器同样设为 79,保证计数单位一致
- 配置好对应的 GPIO(例如连接到需要测量的 PWM 信号)
- 中断设置:
- 为 TIM3 开启输入捕获中断(如果需要中断方式测量)。
[!NOTE]
不要中断 TIM2--CH2:PA1
TIM2--CH3:PA2 //这里是PA2
(要用杜邦线吧PA2和另外一个测频率的引脚(PA6)相连)
Open: image-20251202153314505.jpg
# 初始化:
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_3);
TIM2 -> CCR3 =50;//CCR3 寄存器:在PWM模式下,CCR的值决定了PWM输出的高电平持续时间。
# 4.PWM测频
有两种方法,这里只说PWM测频的
[文件已丢失]
# cubemx配置:
[文件已丢失]
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1); // 捕获上升沿(周期)
HAL_TIM_IC_Start(&htim3, TIM_CHANNEL_2); // 捕获下降沿(高电平时间)(可以没有)uint32_t capture1;
uint32_t capture2;// 捕获某个边沿时 CNT 的当前值(计数值)
float freq;
float duty;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim -> Instance ==TIM3 && htim -> Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
capture1 = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1;// 捕获上升沿(周期)
capture2 = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1; // 捕获下降沿(高电平时间)
//TIM1->CNT = 0;
freq= 80000000/ (80 * capture1);
duty =((float)capture2/capture1);//测量的占空比,输出捕获
//duty = (float)TIM2->CCR/(TIM2-AAR+1);//自己生成的占空比
}
}# 5.比较
# 1.中断回调:
//(2550)输入捕获中断,只需要改PSC,计算频率、占空比
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
//(2547)定时器周期溢出中断回调,需要改PSC和ARR,做周期性任务
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
# 2.初始化:
//PWM输出
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
TIM2->CCR2 = 50;
//输入捕获中断
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
//定时器中断,一定要加IT
HAL_TIM_Base_Start_IT(&htim4);# 6.电路图

{kind=link}